Collating all the feedback as usual, I have four recommendations:
Rebuild an old battleship or two. I’m going to rebuild Marseilles, on the basis that our battlecruisers were always heavily armored and can be brought up to the speed of our new battle line much more readily. I may do one of the Redoubtables, or I may put them on the scrap heap. Devastation will probably go soon too.
Update our light forces some, as I’m able. A Glaive-alike won’t be too too spendy, and will help us move away from the obsolete Harpons.
Build to treaty limits for the next battleship. It’ll be expensive, but intentionally building a second-rate battleship is risky.
Build the next aircraft carrier bigger, to get a proper 1930-ish air wing of 70 to 80 planes.
And we’re off!
February 1929
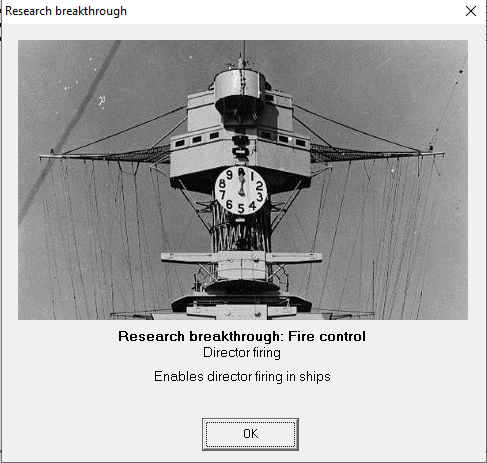
We now have advanced gun directors for our ships, making them yet more accurate, and meaning we have to install them on yet more ships. I think I might pop them onto the Rouen-class battlecruisers first, since they’re now marked obsolete.
April 1929
Bearn enters service. Because we still, evidently, haven’t unlocked the secret to building our own dive bombers, I buy a license to build the British Gloster Goblin. Bearn‘s air wing is nine torpedo bombers, 18 dive bombers, and 19 fighters. Not bad. Maybe we’ll try another exercise this summer, or in summer 1930.
October 1929
Having asked for a new fighter a few months back to match our new torpedo bombers, I pick a new one which can match our torpedo bombers and dive bombers for range.
December 1929
In the last two months, I traded a bit of prestige for a bit of budget, and a bit of tension for a bit of prestige. Worthwhile, in the end, although we are also tweaking Britain slightly.
We make an important advance in fleet tactics: in large battles, aircraft carriers will operate in their own force, meaning that a) I can control them directly even if they’re out of sight of the battleship force’s flagship, and b) they’ll start well out of the way of the enemy, generally.
March 1930
A colonial crisis with Great Britain leads to increased tensions, but also massively increased budget.
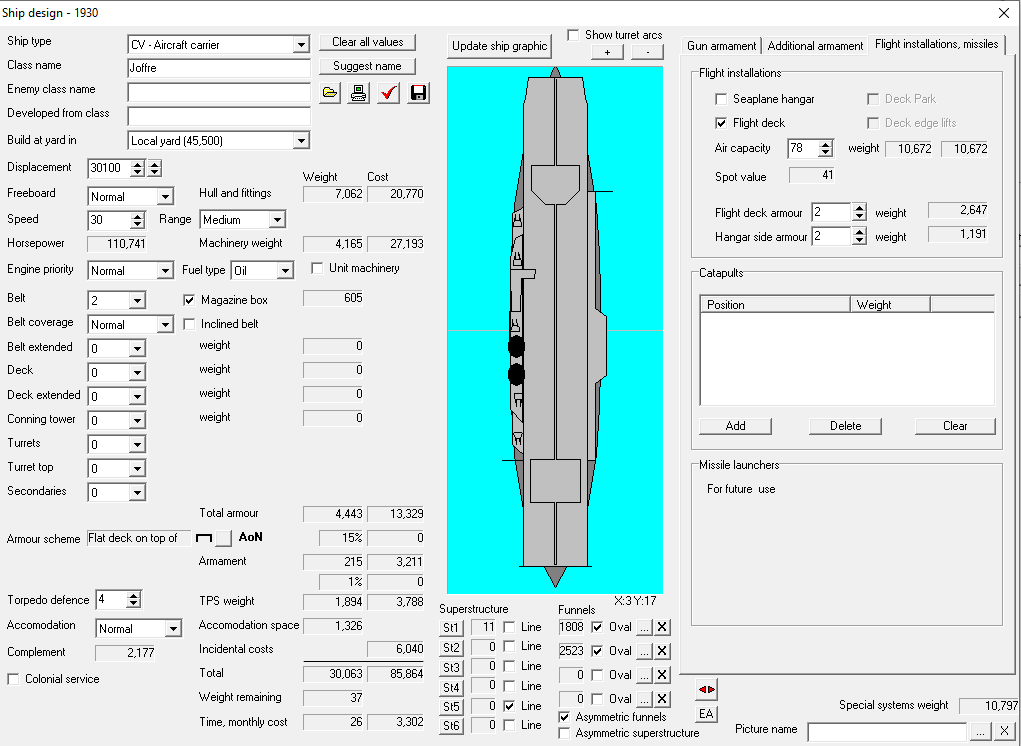
I use it on Joffre, a new aircraft carrier.
She’s not the fastest of carriers, but with a 78-plane air wing, she is quite a capable one.
We’ll lay down the first ship in five months.
May 1930
Or perhaps a bit later than that. A new liberal government takes over, slashing naval budgets. (Happily, not slashing naval budgets too much.)
June 1930
I can just fit the rebuilds of Rouen and Nancy (to use advanced director fire control) in before Courbet and Marseille leave the yards, which I elect to do.
That way, it’ll be October, and I’ll be able to reserve some money the use of which we can discuss prior to the next update.
August 1930
Since we have a pile of money sitting around, I upgrade some of our strategically-important airbases to 60-plane capacity. That group includes the one at Dunkerque, which is well-sited for wars with potential North Sea foes Britain and Germany, and the ones framing Italy and Austria-Hungary in the Mediterranean.
December 1930
If you scratch the politicians’ backs, they’ll scratch yours.
Some of the money goes toward equipping some new squadrons on our new airbases. I’m reserving the rest until next month.
January 1931
Another uneventful update passes.
Plans and Intentions
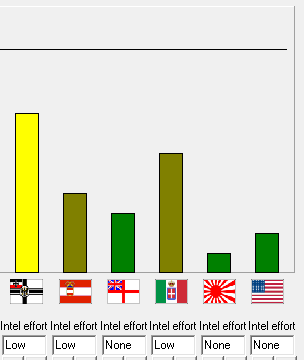
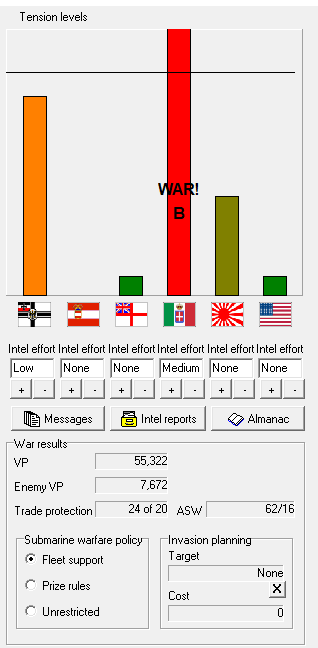
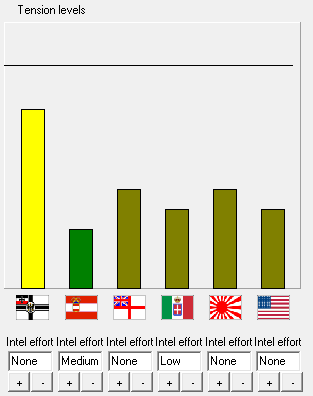
Tensions are highest with Britain and Austria-Hungary, at 4 and 5 (of 12 before war), respectively.
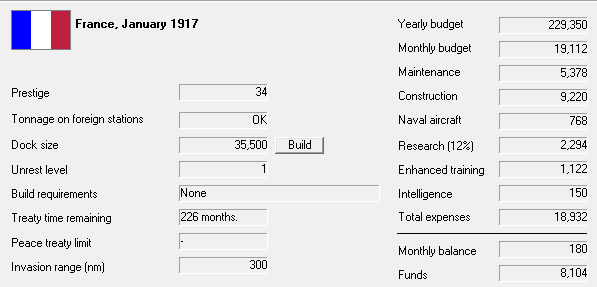
Budget
Our annual budget, 358,300 funds, is on par with Germany’s and only 20,000 less than Britain’s—our wars have been successful, between reparations and worthwhile colonies, at enhancing our monetary capacity to wage further wars.
We spend 8,863 funds per month on ship maintenance, 4,639 on aircraft maintenance (the French naval air service is the largest in the world), and 5,653 on other items, leaving a budget of 10,703 funds per month for construction.
Shipbuilding
At the moment, we’re building ten submarines and our new fleet carrier Joffre.
Ship Planning
We didn’t get a new battleship laid down this update, instead electing to rebuild three ships (Marseilles and the two Rouen-class battlecruisers) and lay down Joffre.
Obviously, that would be a good thing to remedy over the next two years. So, what manner of battleship will we be building? A 30-knot ship with 14″ guns, or a 27-knot ship with 16″ guns? (At present, our battle line is good for 25 knots, or 26 knots if we leave Requin behind.) That’ll account for around 4,000 funds per month.
Of our obsolete battleships, Marengo is the only one left. We could rebuild her to 26-knot speed, given 14 months at 2,300 funds per month, or we could scrap her. Scrap her or rebuild her? Note we have eight other battleships to Germany’s nine (although Germany also has eight battlecruisers to our zero, and we’re far superior to Germany in naval aviation).
Whatever we do with Marengo, we’ll have ten months or so at the end of the update during which to build some new ships. A thoroughly modern light cruiser, with triple turrets, anti-air armament, and room for a scout plane will cost us around 1,850 funds per month, while a modern destroyer with 5″ guns, anti-air armament, and a huge pile of torpedo tubes will cost us around 450 funds per month. So, after Marengo‘s rebuild (or in place of it), we could build five new destroyers at once, or one new destroyer and one new light cruiser. How should we update our light forces: more destroyers, or a destroyer-cruiser mix?
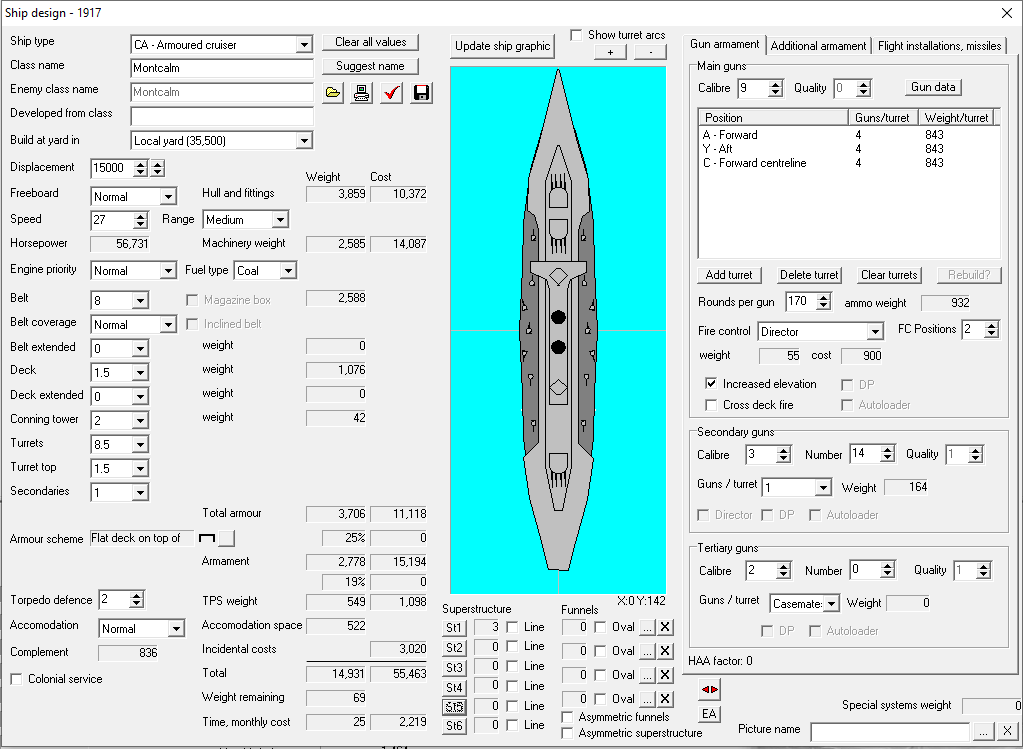
Finally, we have two 27-knot heavy cruisers on hand which date back to 1919 and 1920. They’re too slow to play heavy cruiser in the modern era. We could scrap them, or we could convert them to light carriers. In the latter case, they’d be able to carry 24 aircraft a pop, and we could bump their speed to 29 knots, for a 12-month/2,180-funds rebuild—effectively, two light carriers for the price of one purpose-built new hull. What should we do with the Montcalms?
So, based on voting and my own intuition, here’s what we’ll be doing construction-wise this update.
Bearn, our first full-size aircraft carrier.
The next Ocean–Suffren-type battleship.
A 30-knot battlecruiser or heavy cruiser, to provide some punch against enemy ships of the same time and ensure our aircraft carriers have protection against heavy surface forces.
New airbases in Bizerte, Tunisia, and Kalamata, Greece, along with re-equipping our flying boat squadrons with medium bombers.
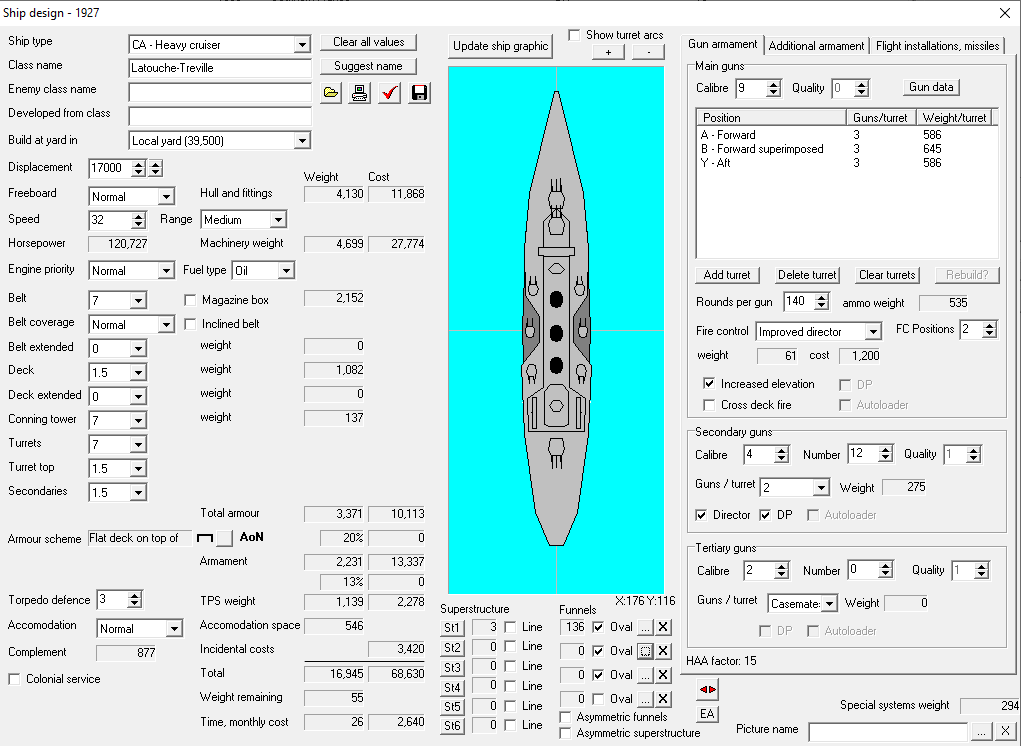
Of the designs I can come up with, the heavy cruiser seems to make the most sense—I can get a capable 32-knot ship for a reasonable price.
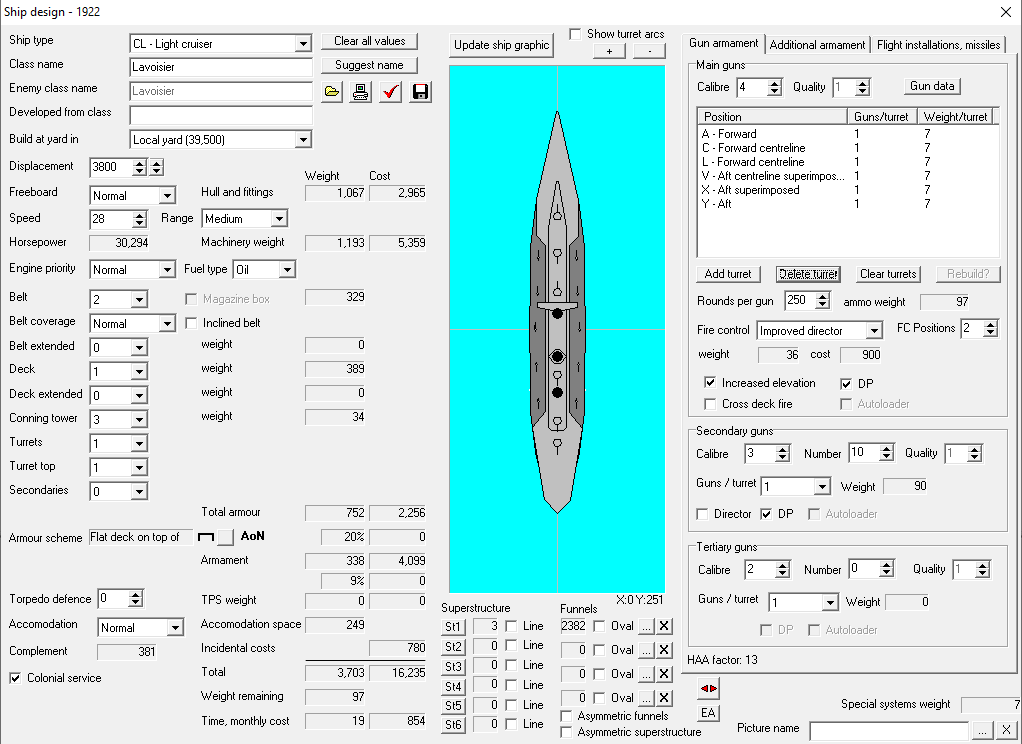
The Latouche-Treville class mounts nine 9″ guns as its main armament, along with dual-purpose 4″ secondaries in twin turrets (a new innovation). Her armament will stop 7″ guns, so she’s an overmatch for any light cruisers she can catch, and she carries a pair of seaplanes with seaplane catapults, allowing her to serve as a fleet scout when the carrier becomes a primary tool in our toolbox.
February 1927
Why is this good for us? Well, on the surface, because our battleship designs have featured an all-forward main armament already. A bit deeper, because mounting all your heavy guns forward allows you to make your armored citadel shorter, which saves weight on armor. The next battleship design’s scheduled for summer. We’ll see what it buys us then.
March 1927
More opportunities to tweak the Austrians! I’ll take it.
Our new medium bomber enters service, which means I’ll have to slowly and laboriously change a bunch of air groups around. I haven’t done a game with a lot of land-based air before. I wonder if I’m missing some feature in the UI that makes this easier.
With an awful lot of money free, I start on another of our projects, rebuilding the Lyon-class battleships to slightly more modern standards.
April 1927
The second Voltaire-class light cruiser enters service. They’re capable ships. It’s a shame there’s only room in the budget right now for the two we have.
If war breaks out, we’ll have a chance to build a few more, I suspect.
May 1927
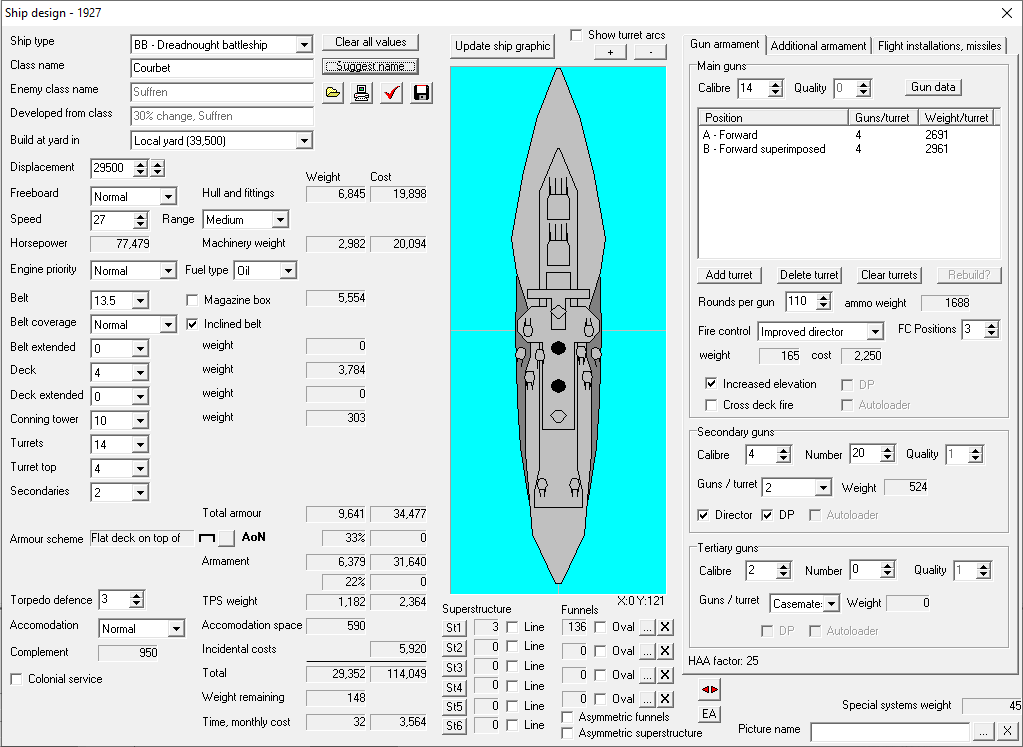
All-forward main armament buys us a few features: more secondary guns, more rounds per main gun, and crucially, another knot of speed. In the grand tradition of naming these after our old pre-dreadnoughts, meet Courbet.
June 1927
The fleet sails for the Mediterranean to counter aggressive exercises by Austria.
July 1927
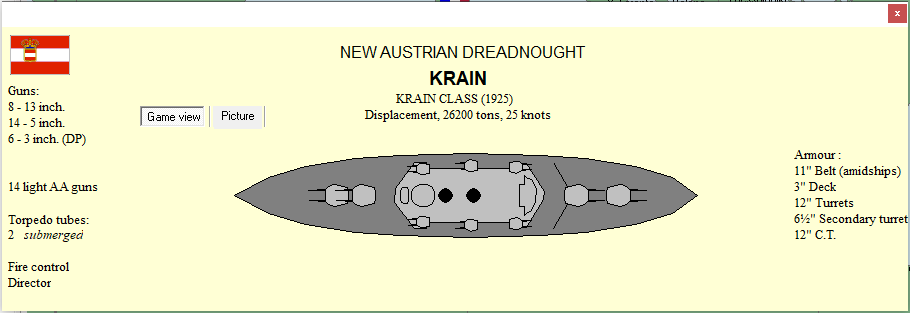
Blueprints for an under-construction Austrian battleship—the most precious of spy data. It’s strictly inferior to our own modern ships.
Suffren enters service, and will be joining the fleet in the Mediterranean soon.
August 1927
The Prime Minister wants more battleships. I take the deal, on the theory that we’ll be at war with Austria soon enough that there won’t be time for the fact that I’m not going to hold up my end to come back to haunt me.
October 1927
Who called it? War is declared, after Austro-Hungarian saboteurs blow up a French destroyer in Brest.
The first battle of the war is a destroyer raid; a number of our corvette-destroyers are in action, because I haven’t had time to set them to trade protection yet. The plan is more or less to run toward port and leave the field to the Austrians, unless there are fewer of them than I expect.
There is, regrettably, little fighting to be done. This is where the Austrians are better than we are. It still comes out as a marginal victory because they elect not to get stuck in, abandoning the bombardment target which was their objective.
November 1927
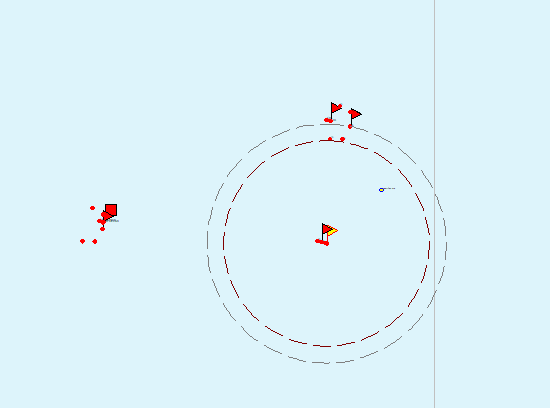
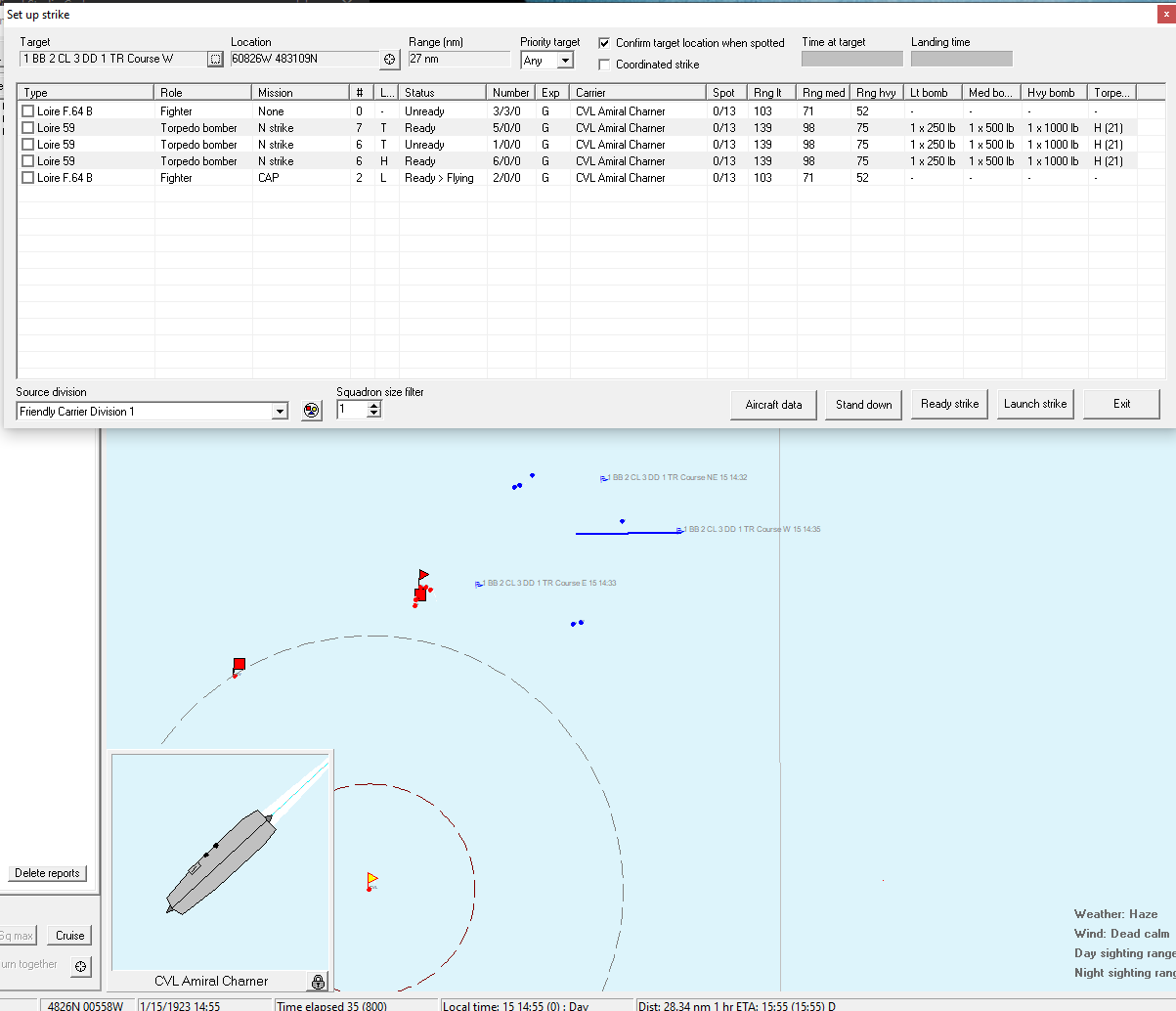
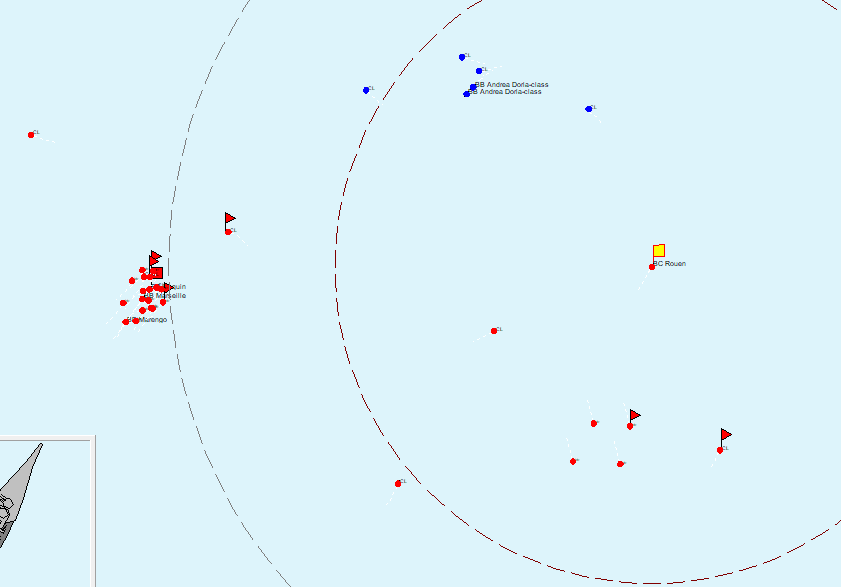
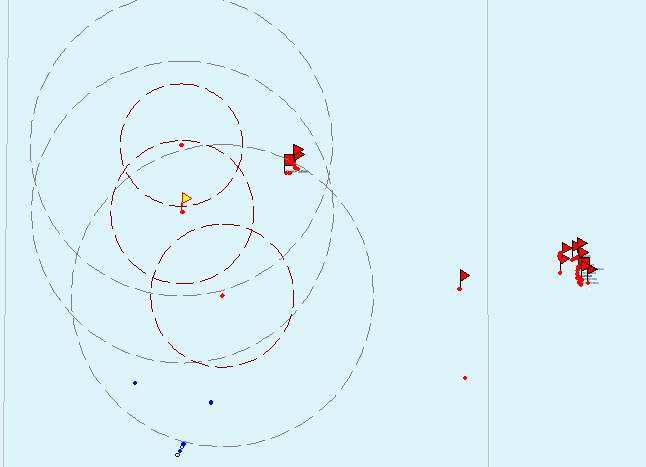
This month’s battle is a convoy defense. The convoy is well to the west, but the Austrians have caught us in an interesting position. North of the sighted ship is our carrier force—Amiral Charner and Arromanches. South is a trio of screening light cruisers. West are Ocean and Suffren, our new modern battleships.
Our medium bombers are in range of the enemy. It’s 1:36 p.m. on a blustery day; sighting range is limited, but air operations are possible, and when the carriers turn into the wind, they’ll be heading away from the enemy. They immediately begin to prepare a torpedo bomber strike.
Dusk comes in three hours.
1:43 p.m.
Another ship appears to the north of the carriers; they’re sandwiched. Both ships, however, are destroyers.
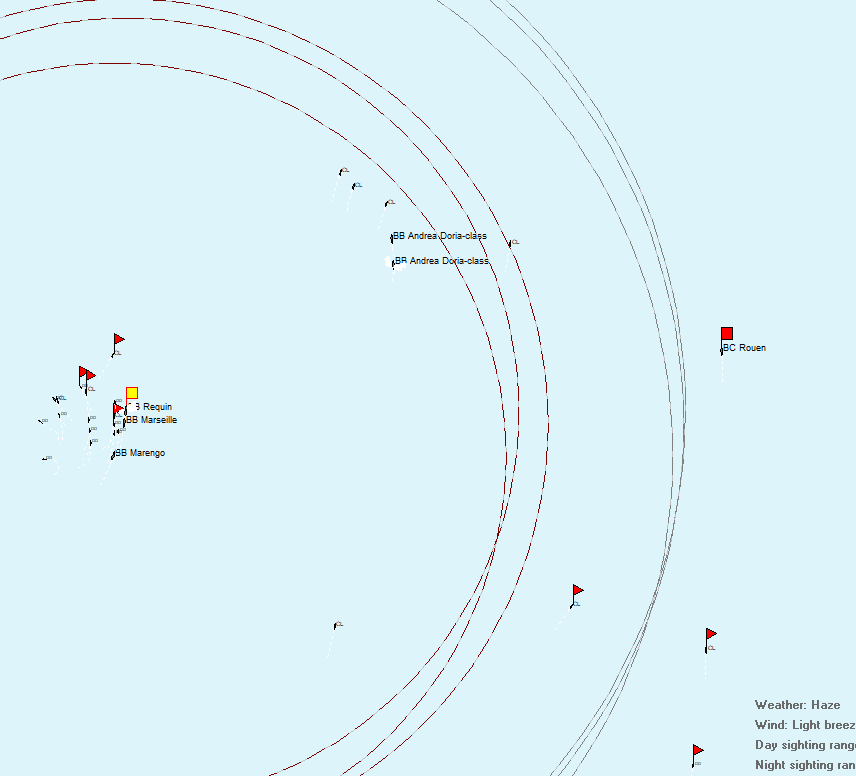
2:40 p.m.
Although our new light cruiser d’Alembert takes a torpedo hit, she has (unusually for a light cruiser) substantial torpedo protection, and weathers it like a champ. Our light forces may not be quite up to Austrian standards, but three light cruisers and six or eight destroyers are perfectly sufficient to force the Austrians back.
The carriers get some reconnaissance aircraft in the sky, following the destroyers as they run north, and turn south, to hide behind the battleships.
4:40 p.m.
The recon planes fan out from the carriers to the north, passing the Austrian destroyers (fleeing north) and turning back as dusk approaches. They don’t spot anything else.
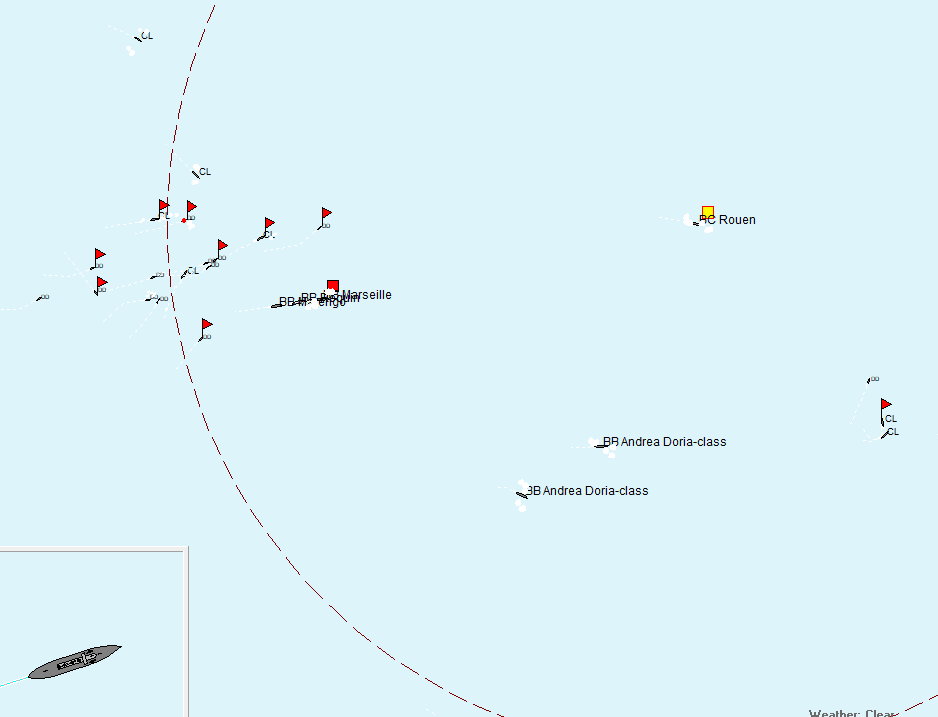
1:56 a.m.
So, imagine my surprise when the scenario ends and I see an Austrian force not twenty miles from my own.
The Austrians were just north of my searching planes (which had gone a little ways past the dots representing the destroyer sightings) when they turned back, shortly before 4:00 p.m. If the Austrians had been twenty minutes faster, we probably would have spotted them, and therefore known they were out there.
December 1927
This one’s a wash. I decline battle with the Austrian destroyer fleet in the Adriatic, the Austrians decline to attack a convoy in the Atlantic protected by Montcalm.
January 1928
Austrian submarines sink a French destroyer and one of our older seaplane tenders. A battle between an Austrian heavy cruiser and a French light cruiser ends inconclusively. The Austrians break off the fight as night approaches.
February 1928
We get some back, sinking a submarine, thwarting several patrolling Austrian raiders, and intercepting a raiding light cruiser.
The light cruiser Surcouf, of the Lavoisier class, approaches a target steaming about midway between Mers El Kebir and Murcia, Spain.
It’s the sole Austrian Jupiter-class light cruiser, their largest and best example of the type. She has more guns than Surcouf, but Surcouf‘s guns are high-quality 6″ numbers against the Austrian 5″, and Surcouf has better armor to boot. We’ll see if we can ring Jupiter‘s bell enough times to slow her down to Surcouf‘s speed.
Over the course of the battle, Jupiter gets very lucky. Although she scores only 8 hits to Surcouf‘s 14, Jupiter‘s last hit disables Surcouf‘s electric generators, slowing her down and giving Jupiter time to escape.
Not, however, for very long. One of our submarines, lurking nearby, torpedoes Jupiter and sinks her as she flees the scene. It goes into the books as a major French victory.
March 1928
Well, that wasn’t quite the ending I expected. It was such a quick war that we didn’t even get any serious reparations out of it. Bit of a waste, truthfully, and now we have to deal with the postwar budget malaise.
April 1928
I make the tough decision to scrap Amiral Charner. She’s slower and less capable than our two purpose-built light carriers, and aircraft aren’t quite the deciding factor yet they will be in the future.
July 1928
Dewoitine comes up with an improved version of their medium bomber, which adds 15 knots of speed and 30 miles of range. It doesn’t take me long to decide that yes, I want to buy that.
October 1928
I wasn’t for it, but France signs another naval treaty. The limitations on this one are a bit less restrictive—35,000 tons, 16″ guns—but the concomitant budget hit means I’m going to have to delay or cancel some projects.
November 1928
An improved torpedo bomber enters service, nearly identical to our current model but with slightly longer range and slightly better speed.
In technology news, we’ve unlocked AA directors (which improve the accuracy of anti-air guns, and should be refit onto our ships as we have time) and triple turrets for light cruisers, which should make for some designs with better weight efficiency.
January 1929
We come to the end of another update, tragically much shorter than I had hoped it might be, given the joys of wartime budgets.
Fleet Report 1929
I haven’t provided a full picture of the fleet in some time, so I thought I’d do so in this update.
Battleships
Devastation, built in 1910 and rebuilt in 1916. 22 knots, 8 12″ guns in four double turrets, including wing turrets with cross-deck fire. Mothballed. Candidate for retirement.
Lyon, built in 1912 and rebuilt in 1927. 26 knots, 6 15″ guns in three non-superfiring centerline turrets. In reserve.
Marseilles, a Lyon-class battleship built in 1912 and rebuilt in 1916. 24 knots, 6 15″ guns. Mothballed. Candidate for rebuild to 1927 spec (12 months, ~2300 funds per month) or retirement.
Redoubtable and Marengo, Redoubtable-class battleships built in 1913 and rebuilt in 1917. 22 knots, 10 12″ guns in four non-superfiring centerline turrets. In mothballs.
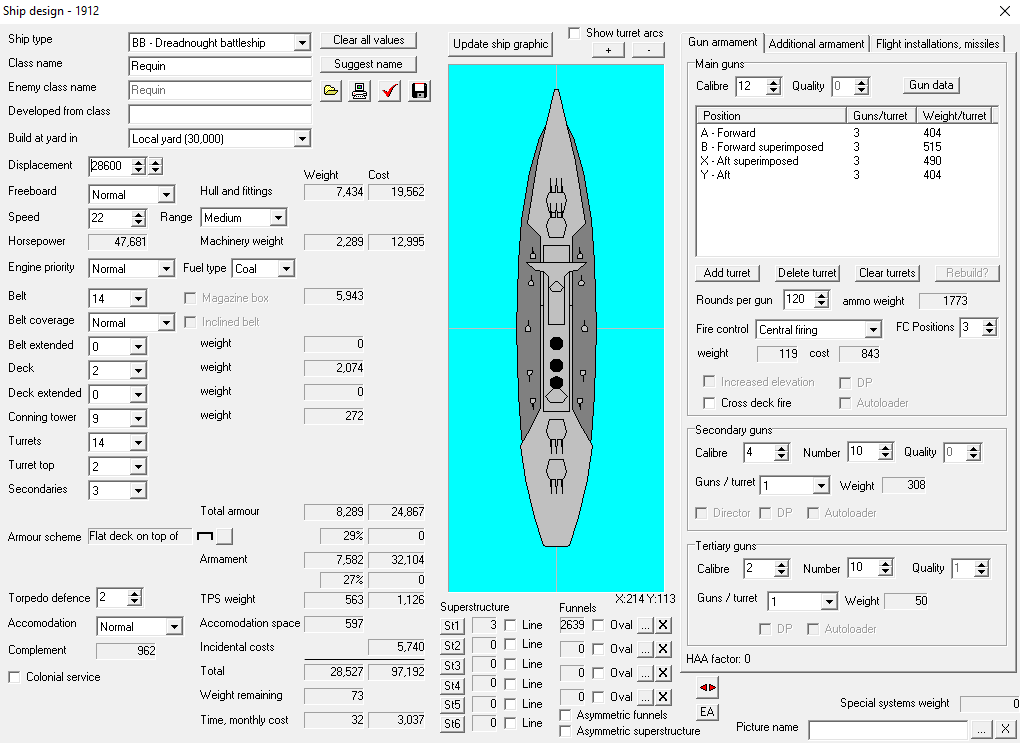
Requin, built in 1915 and rebuilt in 1923. Our first fast battleship. 25 knots, 12 12″ guns in four superfiring turrets. Active.
Ocean, built in 1923. First in our line of modern battleships. 26 knots, 8 14″ guns. Active.
Suffren, built in 1927. 26 knots, 8 14″ guns. Active.
Battlecruisers
Rouen and _Nancy, Rouen-class battlecruisers built 1915 and 1920. 27 knots, 9 12″ guns. Candidates for rebuild (would push speed to 29 knots, add AA armament). Active.
Heavy Cruisers
Montcalm and Bruix, Montcalm-class cruisers built 1919 and 1920. Slow for their role. 27 knots, 12 9″ guns. Candidates for retirement? One active, one in reserve.
Light Cruisers
Three Chateaurenault-class cruisers, built 1903-1905. Designed for cheap foreign service. Badly obsolete, but cheap to maintain, and they fill tonnage requirements overseas where most of our preferred opponents have no presence. 24 knots. 10 4″ guns. Active.
Two Pascal-class cruisers, built 1910. Also obsolete, but also filling tonnage requirements. 24 knots, 8 5″ guns. Active.
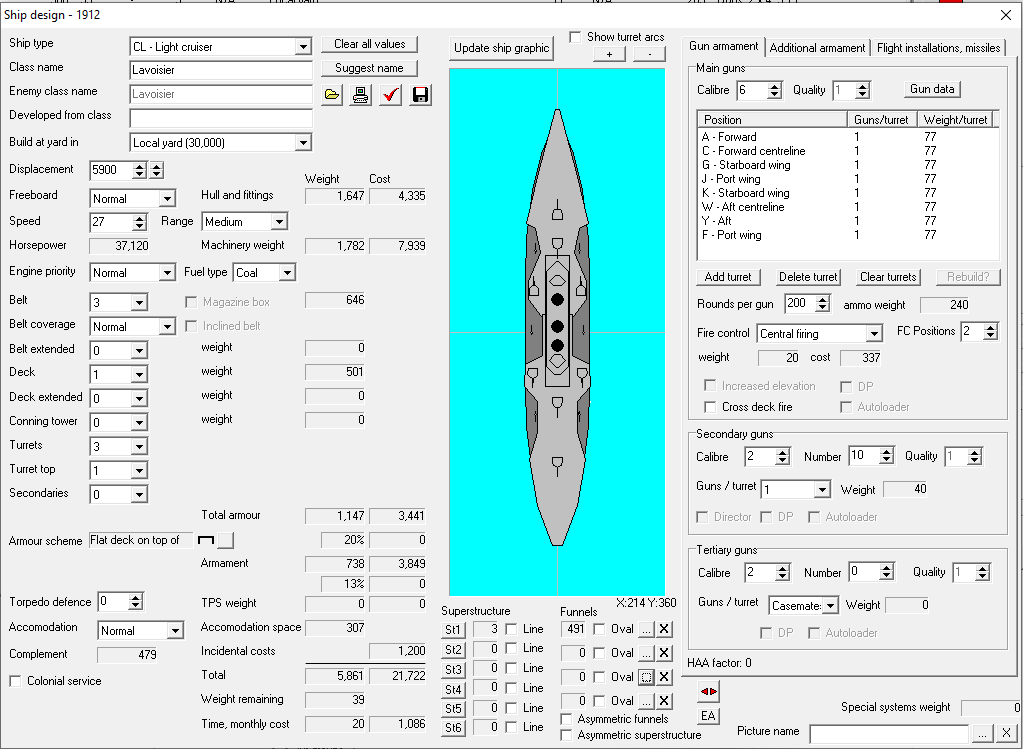
Two Lavoisier-class cruisers, built 1916-1917. 27 knots, 8 6″ guns with a 6-gun broadside. Might benefit in terms of maintenance costs from a rebuild, but a bit too old-school in design terms. In mothballs.
Five Troude-class light cruisers, built 1917-1919. 28 knots, 8 6″ guns with a 6-gun broadside. Similar situation to the Lavoisiers. One in mothballs, four active.
Four Condillac-class light cruisers, built 1924-1926. Exclusively for foreign service. 28 knots, 6 4″ guns, 6-gun broadside. Active.
Two Voltaire-class light cruisers, built 1927. Some of the best in the world, with mines, torpedo tubes, an all-centerline armament, and a dual-purpose secondary battery. 31 knots, 8 6″ guns. Active.
Arromanches and Dixmude, light carrier, built 1925-1927. A bit slow, but still capable enough to keep on the books for years to come. 28 knots, 24 aircraft. Active.
Destroyers and Corvettes
Five miscellaneous obsolete destroyers, rebuilt 1919-1921 to serve as corvettes. In mothballs.
16 Harpon-class destroyers, built 1915-1919. Obsolete by the game’s reckoning, but still reasonably efficient by the standards—speed and torpedoes—by which I judge destroyers. 33 knots, 3 3″ guns, 4 torpedo tubes. Active.
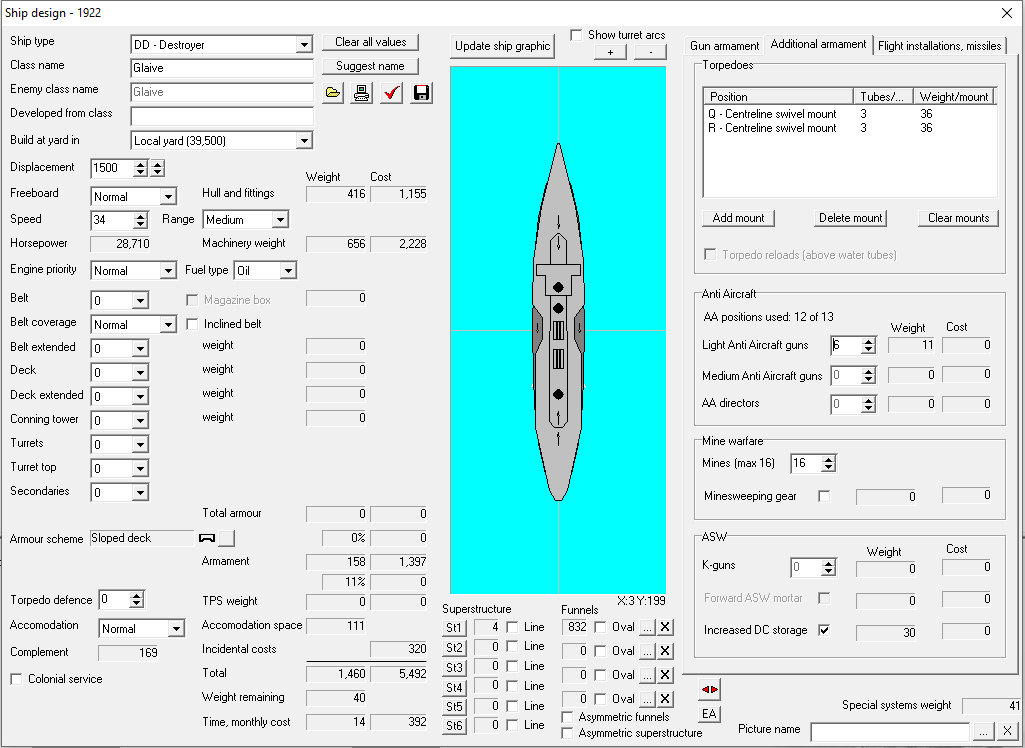
Four Glaive-class destroyers, built 1923-1925. 34 knots, 4 4″ guns, 6 torpedo tubes, 16 mines, anti-aircraft guns. Active.
Fifteen Carabinier-class destroyers, built 1926-1927. Built to serve as corvettes, in place of a similar number of obsolete 500-ton destroyers from the turn of the century. 26 knots, 2 3″ guns, 4 torpedo tubes, 6 mines. In reserve.
Seven Diamant-class corvettes, built 1918-1919. 20 knots, 2 4″ guns. In mothballs.
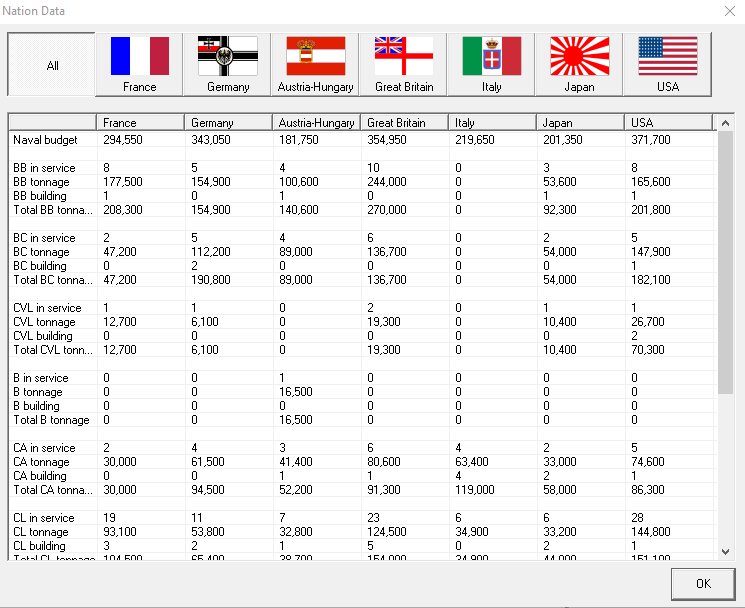
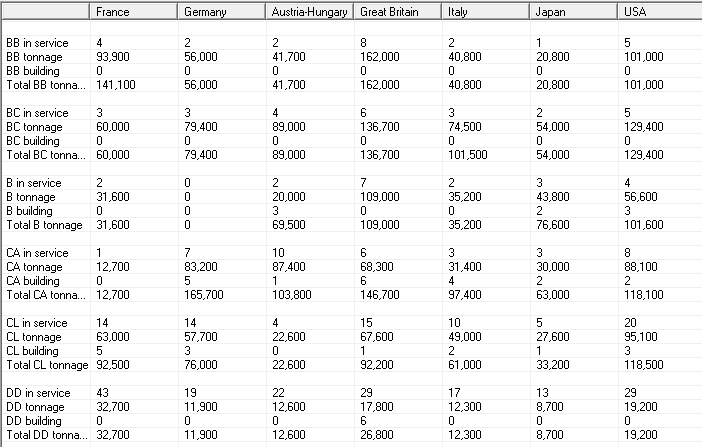
Comparison
Here’s the national-comparison almanac page, so you can see how we stack up.
Plans and Intentions
In out-of-character news, the game’s been updated to version 1.18, which has a number of changes of various impact. It also has an improved and updated manual, and a change to the order of events in a turn so that I can adjust ship statuses before the first battle in a war. Put another way, the first battle in a war (except for surprise attacks when Japan’s involved) happens on the month following the outbreak of the war.
Budget
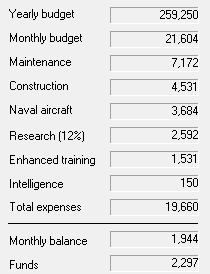
This is where things get tough. With some extremely aggressive mothballing and reserve-fleeting, here’s how our budget looks right now.
That is, we have about 6,500 funds per month. What does that buy? Some combination of the following.
4,000-4,200: an advanced battleship (see below, under Ship Design). ~36 months.
3,500: a standard battleship (like our existing series). ~36 months.
2,700: a heavy cruiser. ~24 months.
2,550: an aircraft carrier a la Bearn. Future carriers will carry more aircraft, because they’ll be free of the requirement to have cruiser-style guns. ~24 months.
2,500: a rebuild of an existing battleship to use up-to-date machinery and add anti-aircraft capability. ~12 months.
1,550: a light cruiser a la Voltaire. ~18 months.
350: a destroyer a la Glaive. ~12 months.
There are four ships in the dockyards right now: Courbet, a standard battleship, Latouche-Treville, a heavy cruiser, Diderot, a light cruser, and Bearn, an aircraft carrier. Courbet and Latouche-Treville are paused for money reasons—we don’t have enough surplus to resume construction on either one right now.
Diderot and Bearn will be complete in six months, which will free up just enough budget to finish Courbet and Latouche-Treville. Assuming that’s what we do, Latouche-Treville will enter service in mid-1930, and Courbet will arrive right around the next update in early 1931.
Ship Design
The new treaty is the limiting factor on battleships again. We could make either a 27-knot, 16″ battleship within the treaty limits (~4000 funds per month), or a 30-knot, 14″ battleship (~4200 funds per month).
Or, we could continue to build existing budget battleships, like the ones we have now, and focus on other ships. Our destroyer force is weighted toward old ships right now, and it always seems like we need more light cruisers than we have.
What Next?
I didn’t ask any direct questions above, on the theory that there’s enough information that some ideas might be coming to you already. Are they? If so, what do you think we ought to do? How should we prioritize ships over these next two years, given our budget constraints? What should we do with the ~2,000 funds per month we have on hand now?
The votes are in, and it looks like we’re building, in about this order:
A Condillac.
Some submarines.
A fleet service light cruiser, once money is available (i.e., after Arromanches finishes building.)
Another aircraft carrier, if it’s still within the scope of this update.
It’s a star-studded cast of names. Our Condillac is named Descartes, and our four submarines are Foucault, Volta, Bernouilli, and Ampere.
February 1925
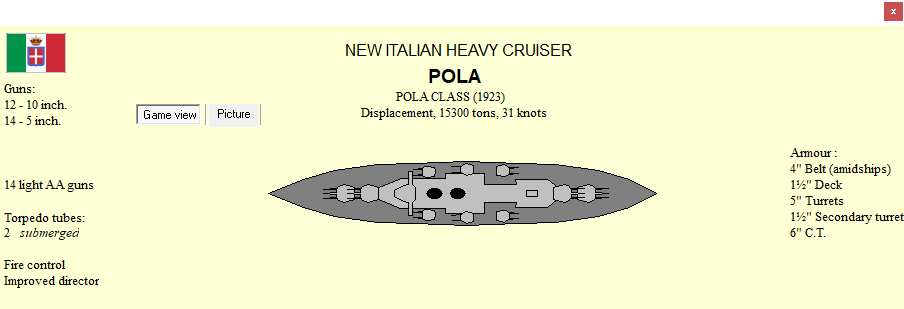
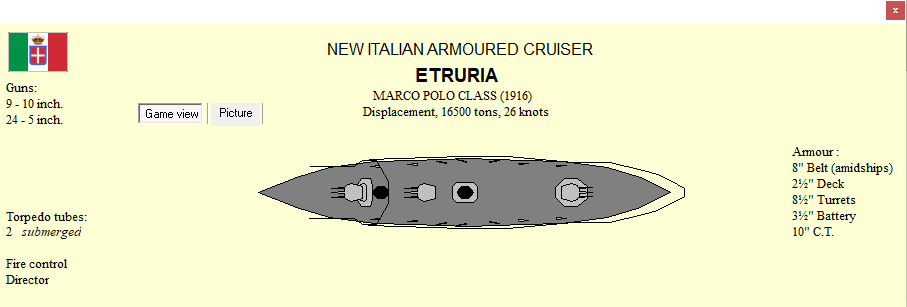
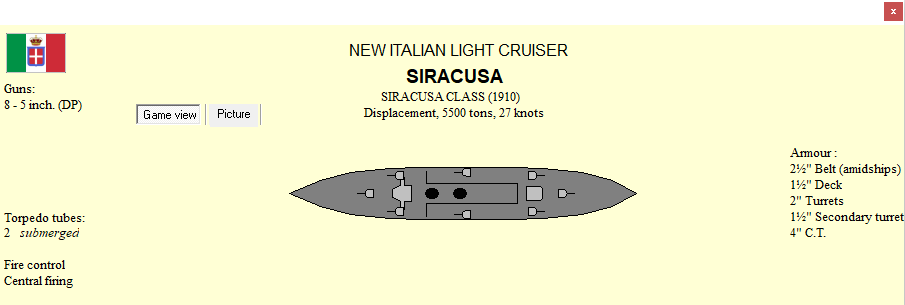
Italy’s newest heavy cruiser is an overmatch for our own. Granted, we only built ours because of that brief naval treaty before Italy decided it was time to get punchy.
March 1925
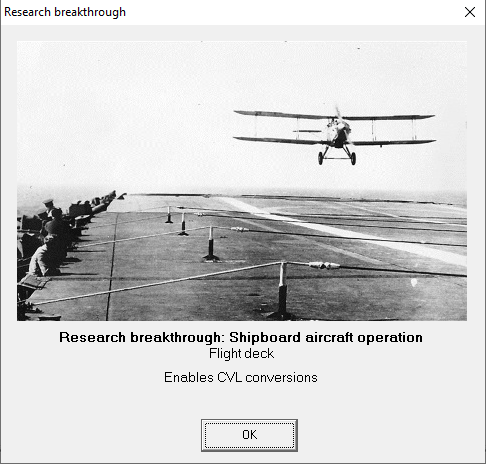
French engineers invent the transverse arrestor wire, and duly simplify the installations on our existing aircraft carrier.
I believe this is a few years in advance of history. The earliest arresting cables ran, if I’m reading these histories correctly, fore and aft along the deck, spaced about 9 inches apart and suspended a foot or so above the deck on leaf springs (like modern, transverse arresting gear). The purpose was less to slow planes down—they were generally small and light enough that speed wasn’t a problem—and more to keep them from being blown over the side by gusts of wind. When the plane landed, hooks on its landing gear would engage the wires and guide it in a straight line to a stop.
USS Langley originally had both longitudinal and transverse wires, but got rid of the former in 1927. USS Lexington and USS Saratoga, both commissioned as aircraft carriers in 1927, were built from the outset. The French, on their sole historical aircraft carrier Béarn, also commissioned in 1927, used a modern transverse system as well.
April 1925
Good news, everyone! A minor crisis with Great Britain, which doesn’t even push our tension with them from green to olive, means we’re swimming in cash. Time for that new light cruiser design, I think.
The Voltaire class of light cruisers hit 30 knots, and feature light armor, a large torpedo armament, eight six-inch guns in four double turrets, a selection of mines and anti-air guns, and eight dual-purpose secondary guns.
I’d hoped to get them up to the same speed as Italy’s forthcoming heavy cruisers, but it wasn’t in the cards.
June 1925
Two Voltaires go into production: Voltaire and d’Alembert.
Also, it’s June, and war still looks pretty far off, so let’s try a fleet exercise! We’ll even let this one stand without savescumming, unlike the last one.
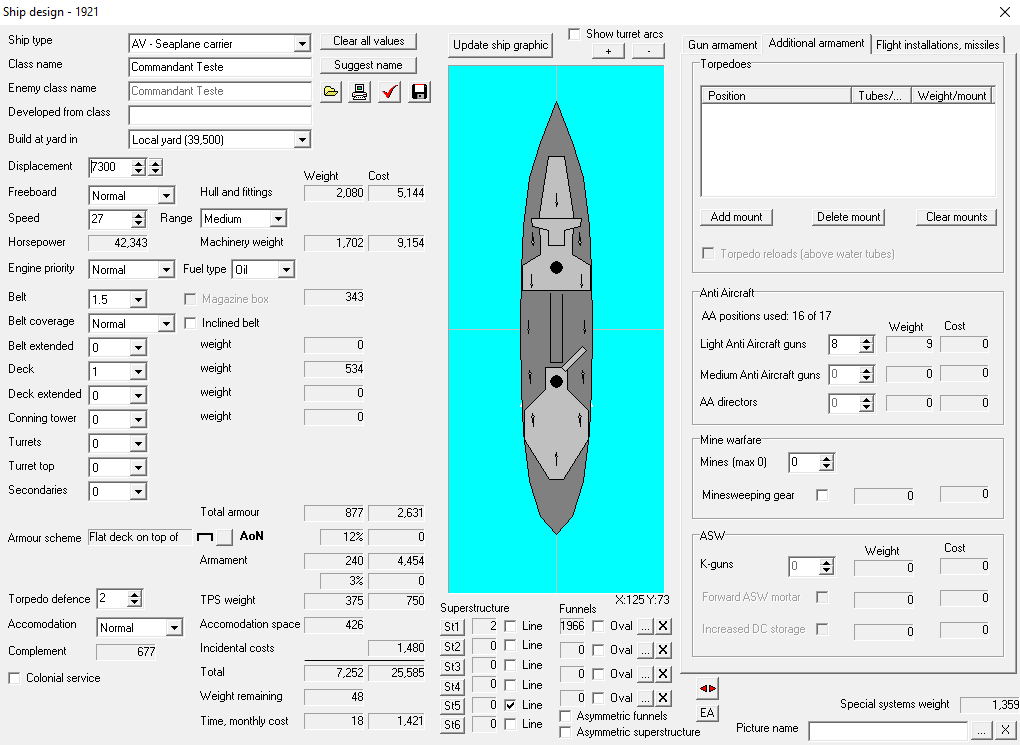
On the Red Team (us), we have Amiral Charner and Commandant Teste, two light cruisers, and three destroyers. On the Blue Team are Ocean and Requin, along with a mirrored supporting force.
The mission starts at 4:24 p.m., which is not an ideal timeframe for our aircraft carrier.
4:35 p.m.
Floatplanes launch from Commandant Teste, while Amiral Charner prepares a strike. If we spot the enemy soon enough, we’ll try one.
5:10 p.m.
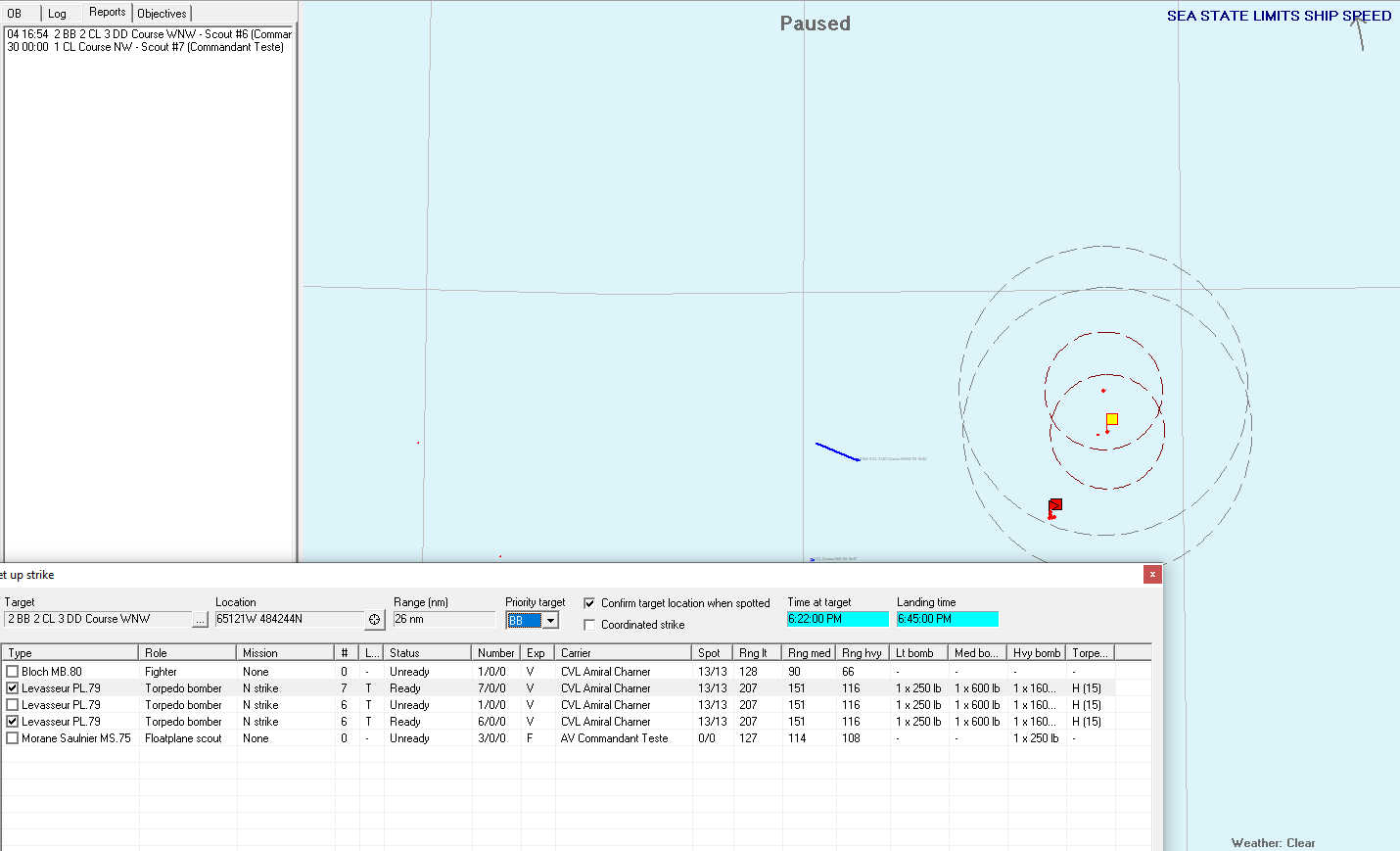
Two scouting reports put the enemy in approximately the same place. Time to launch!
I end up launching Commandant Teste‘s extra floatplanes loaded down with bombs, too. Can’t hurt!
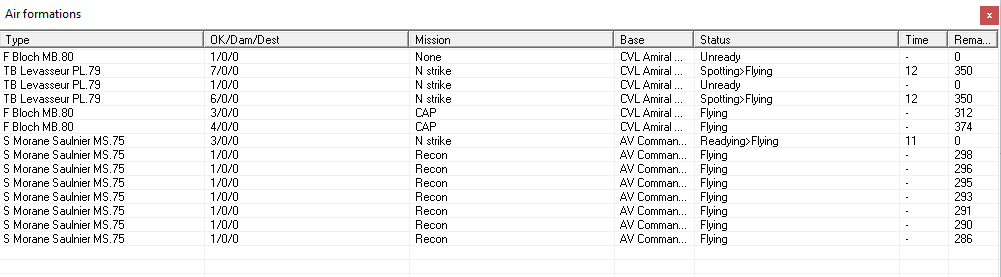
5:22 p.m.
Here in the Air Formations window, you can see our various aircraft preparing to fly—Amiral Charner‘s torpedo bombers will be spotted to the deck in 12 minutes (they were readied in the hangar but not lined up for takeoff, to avoid crowding the deck).
The fleet turns to the northeast to keep distance between themselves and the enemy fleet.
5:41 p.m.
Thirteen torpedo bombers are in the air. Commandant Teste‘s launch operations are a bit more complicated, involving cranes, stopping to put planes into the water, and the like, so that element of the strike will be a bit later.
6:00 p.m.
Teste launches her seaplanes. Since it’s summer in the Bay of Biscay, dusk isn’t until 8:20 or so. We’ll still have daylight for aircraft recovery, an important factor.
6:30 p.m.
The aircraft we launched at the floatplane scouting report reach the scouting report’s location, circle for a bit, and set off on something of a search pattern.
6:37 p.m.
Those are the floatplanes, but the torpedo bombers are, according to my map, in the same area. (I’m not sure if fog of war applies to the reported position of friendly aircraft, but it would be just like this game if it did.)
6:46 p.m.
The torpedo bombers find the enemy, and all thirteen start their attack run.
6:50 p.m.
Two torpedoes hit one of the enemy ships. A few more aircraft remain to take their shots. A third hits a minute later.
7:13 p.m.
Returning strike aircraft report one battleship heading south, instead of the two the enemy started with. We won’t know until after the exercise how well we did, but we might have got one.
I don’t think there’ll be time for a morning strike, but I’ll be staying in the area just in case I can get aircraft off the deck before the end of the scenario.
8:20 p.m.
Twilight arrives, just as the last of the day’s CAP lands on Amiral Charner.
10:07 p.m.
Let’s see. 344 minutes of 800 in the scenario elapsed, dawn in… 330 minutes. Looks like meat’s back on the menu, boys!
3:38 a.m.
Twilight’s right around the corner. Soon, scouts will be in the air, so I’d better work out my plan.
The enemy is, I think, thataway. If they ran for the coast (that is, a port, although none are technically available in this exercise), I don’t care. I don’t think they got around behind me into the Celtic Sea, so I’m not spending aircraft on scouts in that direction.
I don’t remember quite what the rules are for ‘planes in the air’, so we’ll see when it cuts me off.
5:43 a.m.
Evidently, it’s ‘planes in the air with the enemy in sight’ as the cutoff rule. Oops.
Anyway, it also turns out that your floatplane carriers won’t launch scouting missions if their air wing’s mission has been set to something other than Recon, like it was when I used them for an air attack.
In the final reckoning, we get Ocean with one torpedo and Requin with two, causing light damage to the one and medium damage to the other. Not bad, for 1920s technology, but not a reason to cancel the battleship program altogether, either.
On the plus side, Ocean, Requin, Amiral Charner, and Commandant Teste are all now Elite-skill ships, and the exercise made Austria-Hungary a little touchy.
January 1926
Holy long delay, Batman! The second half of last year was boring, though, so you didn’t miss much.
Arromanches entered service, and her successor is now under construction.
I took a 15-destroyers deal, on the theory that I can build a modern, cheaper replacement for the old Fauconneaus I rebuilt as pseudo-corvettes with improved features—in particular, minelaying. The new Carabinier class is slow at only 26 knots, and unlikely to see any duty beyond trade protection, but advanced technology and extra depth charges make them better sub-chasers, and the aforementioned minelaying ability will give us an edge in tight seas (such as the Mediterranean and North, where we spend most of our time.)
June 1926
Holy long delay again, Batman! The first half of this year was more boring than the last. The only happening of note was our development of motor torpedo boats.
July 1926
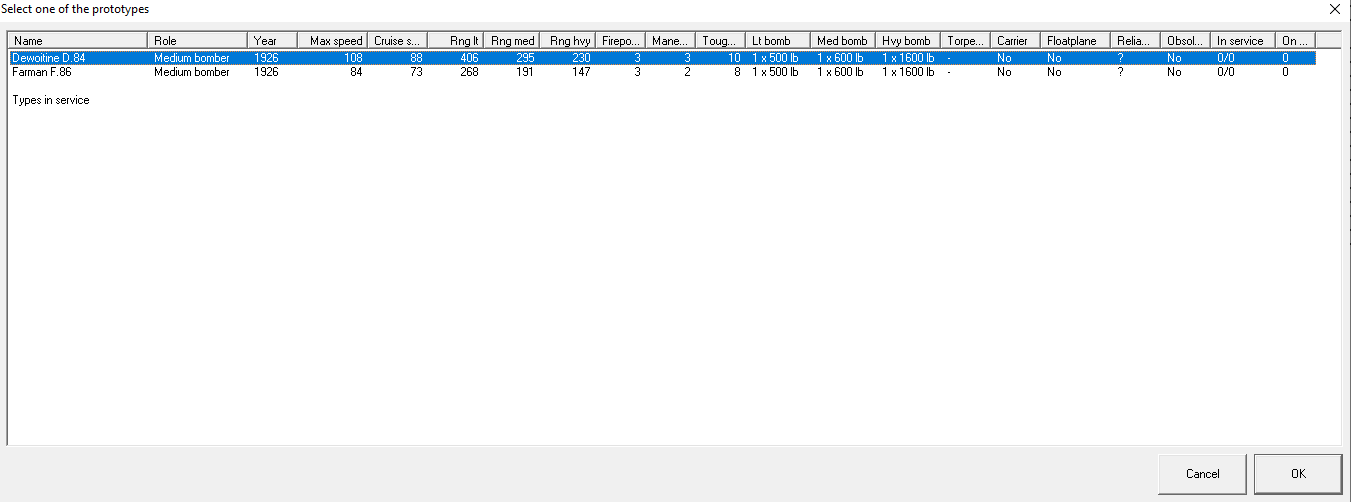
We learned how to make medium bombers a while ago, and Dewoitine has a doozy of a prototype for us:
Longer range than our flying boats by a long shot. They’ll make good land-based scouts going forward. I start a new request for torpedo bomber prototypes. Ours are looking a little long in the tooth.
January 1927
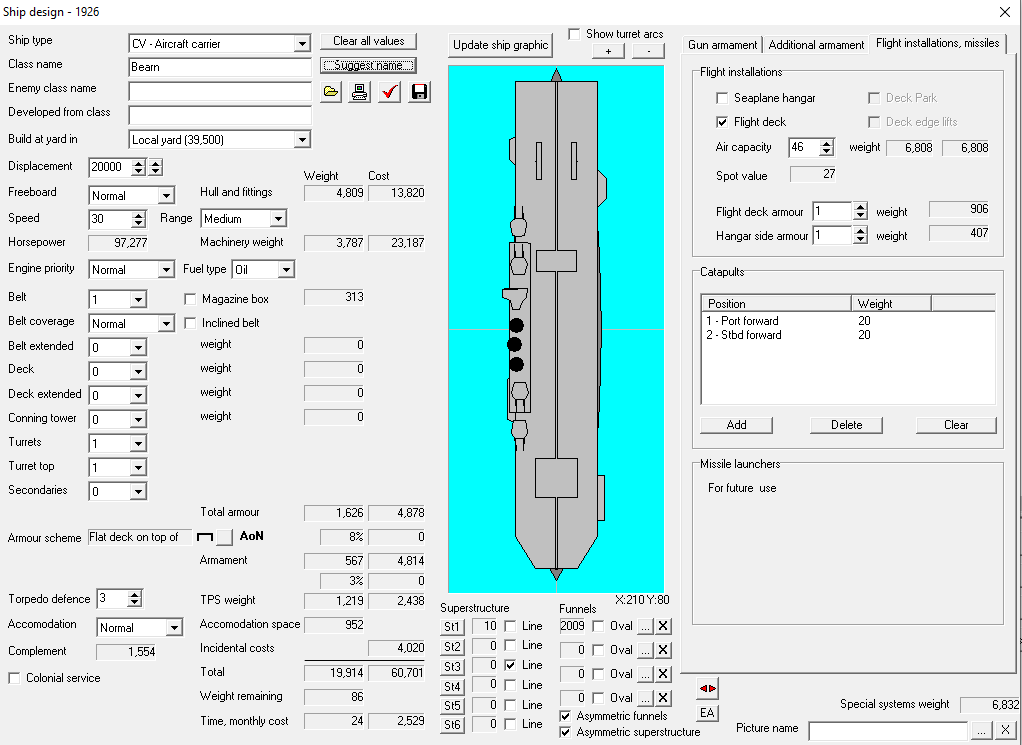
I must have missed our development of full-size CV conversions (or we skipped that technology; see research note below), because we just developed full-size CVs. The first aircraft carrier you build has to have substantial gun armament, because naval design bureaus are unimaginative. To get that out of the way, I’m building a one-off.
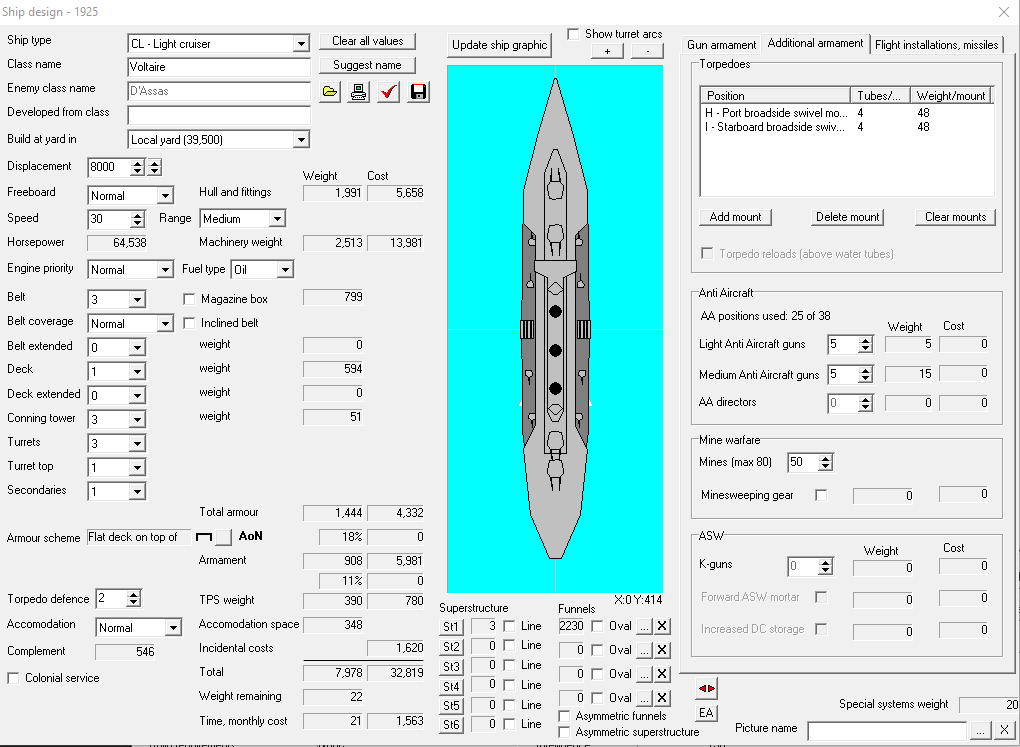
Named after France’s historical interwar carrier, Bearn (well, Béarn, but I don’t know if the game can do accented characters) carries a 46-plane air wing and no catapults. (The ones pictured I added before hitting the ‘check design’ button; we haven’t worked out aircraft catapults on carriers yet.) 30-knot speed should keep her out of trouble. Along with her 6″ main guns, she has a large battery of dual-purpose 3″ secondary guns in double turrets (another new research item), and passable AA machine gun armament.
Her flight deck and hangar sides are armored, an important consideration in tight seas. TODO: discuss.
Research note: some technologies in Rule the Waves 2 are marked as skippable—your scientists may simply move on to the next technology. Taking a quick look at the wiki, CV conversions are indeed in that category.
Reports, Plans, and Intentions
Finances (and Shipbuilding)
Nine months from today, we’ll have a free construction budget of 8,538 funds per month. 2,500 or so of those will go toward building Bearn. 3,500 or so are probably earmarked for the next battleship in the Ocean–Suffren series (which will be another incremental improvement of very similar design).
So, it’s time for another priorities question! What do you think is important as we careen toward the 1930s?
More Voltaires. I have another eight names lined up for ships in that series, and they’re currently the only non-destroyer ships in French service that can keep up with our newer carriers.
More battleships. We can probably swing two of the next class in line, or perhaps one of those and one 30-knot battlecruiser as a heavy escort for the carriers.
Heavy cruisers. As always, we’re behind in this race. The difference this time is that we don’t have a large fleet of battlecruisers capable of running them down and defeating them.
Battleship updates. The money’s there to make that 25-knot battle line I keep talking about.
More airbases on land. Our shiny new medium bomber is coming soon. It would be good to have some of them to throw around, especially given rising tensions with Austria-Hungary, who we can nearly bottle up by building more bases in Greece.
One thing to note: our fleet is no longer the fastest on the seas. We’re not the slowest, but we’re definitely middle of the pack nowadays. On the other hand, our two early-20s cruisers are much, much more heavily armored than enemy heavy cruisers, an edge we may be able to press in a war.
Diplomacy
Speaking of rising tensions with Austria-Hungary, we could finally be getting the war we wanted from the start. Tensions with the Austrians are twice as high as everyone else, and on the border of yellow and orange. If we push them, we can get them into a fight, I bet, starting with cranking up spying to high.
Between Easter and an evening-hours project I’ve been working on, I didn’t have time to compile the What We’re Reading post this week. I’ll roll our selections from this week into next week’s.
February 1923
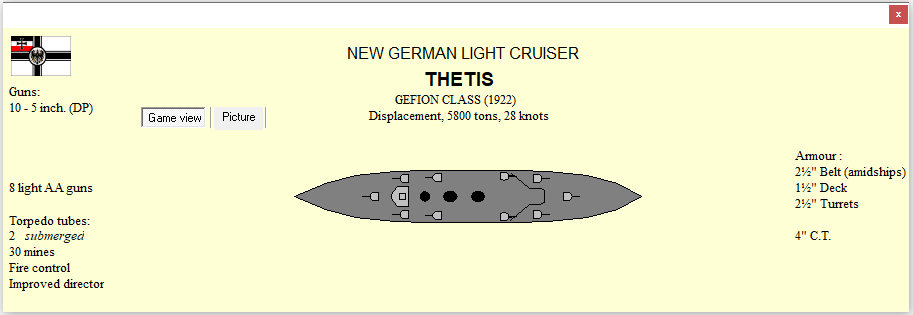
The new-model German light cruiser Thetis is broadly equivalent to our recent light cruisers, though granted with added anti-air firepower and minelaying capability. (Our next European-service light cruiser will have those issues corrected.)
March 1923
This will let us build a better seaplane tender, one which doesn’t have to stop to launch a seaplane, as well as build cruisers (potentially even light cruisers) with the ability to conduct seaplane scouting.
Currently, our doctrinal preference is to use seaplanes for scouting over torpedo bombers or dive bombers. This will save us ten or fifteen planes for strikes, when the time comes for that, but float planes are slower and less reliable than wheel-equipped carrier aircraft. Something to consider in the future.
April 1923
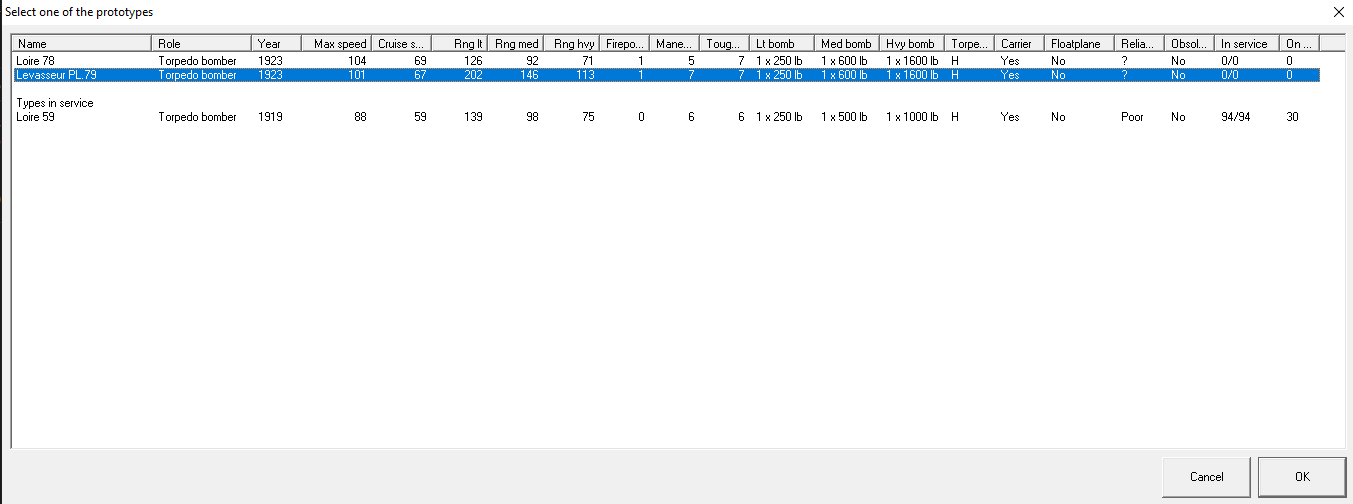
Loire loses its place as the provider of fleet torpedo bombers.
Because we got dinged for not building enough destroyers, I elect to rebuild Requin (the last and best of our 12″ gun ships) instead of starting a new Ocean-class. This will bring her up to 25 knots, fast enough to hang with Ocean. Hopefully, when the rebuild’s done, we’ll have the budget in hand for a new Ocean follow-up.
May 1923
After a long, long wait, we’ve finally worked out how to do double gun mounts on a light cruiser. That might call for a new class—superfiring double turrets will give us a broadside advantage on known enemy light cruiser designs.
July 1923
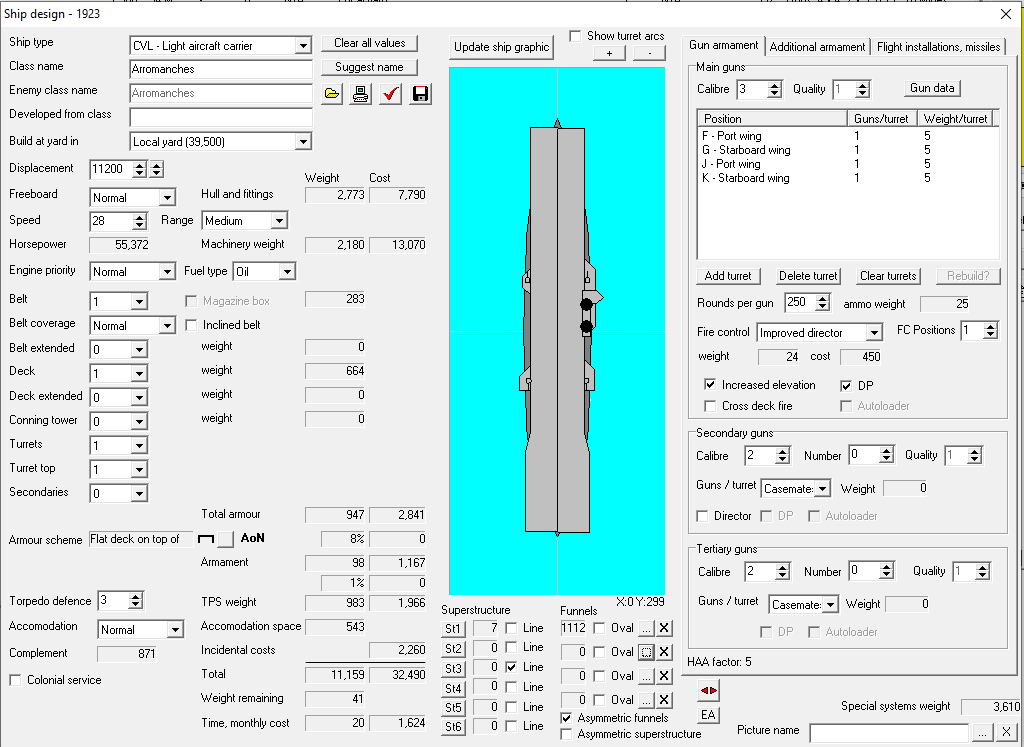
Commandant Teste‘s replacement in the build order will be a light aircraft carrier. Why that, instead of a seaplane carrier? Well, this carries 24 aircraft to Teste‘s ten, mainly. Split evenly between fighters and torpedo bombers, it’ll be a better scout and be able to provide a CAP over the fleet.
No catapults, but it’s just large enough so that we won’t lose the ability to operate planes with heavy load from it. (That cutoff is, I believe, 10,000 tons.)
August 1923
On the plus side, at least for interesting gameplay notes, another naval treaty is signed, limiting us to 30,000 tons displacement and 15″ main guns for 8 years. On the minus side, it really tanks our budget.
For comparison, Ocean is a 30,800-ton ship with 14″ main guns.
November 1923
The new budget is a real kick in the teeth, doubled in intensity by our invention of quality-0 16″ guns so soon after the naval treaty. The building program will, alas, be somewhat reduced.
March 1924
Somewhat delayed by the treaty budget, the first Arromanches-class carrier hits the shipyards. In four months or so, we’ll be in position to try an Ocean-class follow-on, budget-wise.
July 1924
Suffren, our next in the Ocean series of battleships, goes into the design studios. She’s almost identical to the Ocean class, but drops a half-inch of belt armor and a few secondary guns in exchange for torpedo protection 3 and fitting in under the weight limit.
November 1924
Project ‘annoy Austria-Hungary into a war they can’t win’ proceeds without a great deal of success.
It does make us enough money to pay for Suffren and a destroyer, at least.
December 1924
Britain’s working on an interesting cruiser. High speed, light armor, light weight.
January 1925
The middle way in an African crisis puts us in a good position financially. Rather than decide what to spend it on myself, since we’re right at the end of an update, I’ll put it to a vote. Read on.
Plans and Intentions
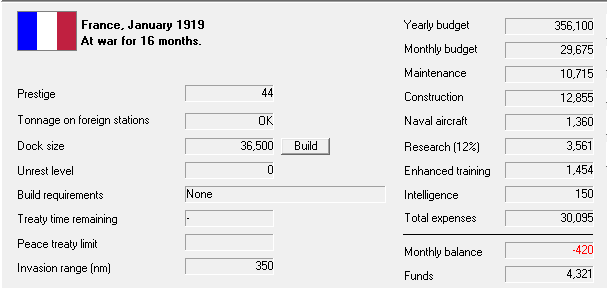
Tensions are low-ish across the board, with Austria-Hungary and Germany taking the lead at about halfway up the to-war meter.
Currently, we’re running a surplus of 1,352 funds per month, with three ships under construction: a Glaive-class destroyer, our first Arromanches-class light aircraft carrier, and Suffren.
That surplus is enough to do one of three many things, in combination with what we have in the rainy-day fund:
Rebuild the Redoubtables, our 1913-era battleships, with modern fire control, anti-aircraft guns, and 25-knot speed, one at a time. That would give us a decent 24-knot battle line,
Build another two of the new Condillac overseas-service cruisers. That would save us a little bit on maintenance as we pull older ships out of service.
Build some destroyers. We have a good number already (third-most in the world, and many more than our standard competitors Germany, Italy, and Austria; we don’t have many corvettes, though).
Potentially in concert with building destroyers or a Condillac, update the submarine fleet. We’re quite a bit behind in submarine count.
Build another aircraft carrier.
Build a new fleet-service light cruiser, with a burly dual-purpose secondary armament for maximum future-proofing.
Improve our air bases on the Channel Coast to help in future wars with Germany.
Last week’s readership made three strong suggestions:
Stick with new battleships, rather than big refreshes of old ships. (I may still do one now and again, as budget allows, just to start bringing the fleet speed up to 24 or 25 knots.)
Build some airbases in northern France, given the proximity of that part of the country to two major potential foes.
Build another seaplane carrier or two. The most important thing aviation can do for us right now is to provide fleet scouting, and seaplane carriers are a way to do that without spending aircraft carrier money.
To those suggestions, I add my own item:
Start refreshing our old light cruisers with a new, cheap model for foreign service.
We’ll see how much we get done. I’ll start with two airbases, one at Cherbourg and one at Dunkerque.
February 1921
We have a shot at an alliance. I try Britain again, but they turn us down.
April 1921
A mild crisis (a cruiser of ours runs aground off of a neutral power’s shore while conducting wireless intercept operations) sees tensions up to about the midpoint with Germany, Austria, Italy, and Britain, but buys us some extra budget in exchange.
July 1921
Nieuport gets the nod for our next-generation flying boat. It’s quite a bit faster than our old one, and has a range in excess of 250 nautical miles—an excellent scout.
September 1921
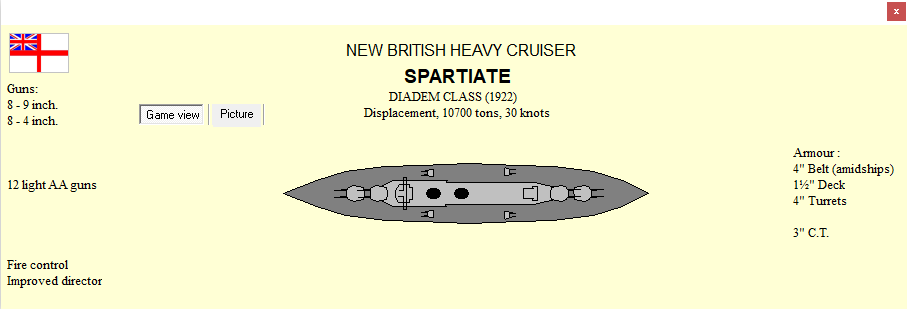
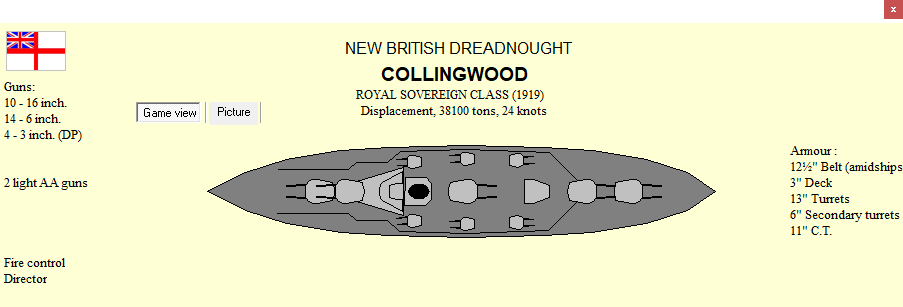
The British aren’t messing around with their new dreadnought.
October 1921
The money’s on hand for a seaplane carrier now. This one is somewhat more capable than our previous two.
In particular, it has AA guns, and carries 10 seaplanes instead of 5. It should make a good fleet scout in the future.
February 1922
With the seaplane carrier well on its way, I can now turn my attention to a light cruiser.
I wanted to call the class Lavoisier, but forgot I still have some of those around. I settled for Condillac instead, and will call the first ship Lavoisier.
May 1922
The Germans are saber-rattling again; tensions continue to creep upwards with them.
June 1922
A peace conference in the midst of tensions with Germany produces no results, but does slightly lower tensions across the board.
July 1922
The Austrians catch a French spy. I elect to make him a national hero, but the Austrians barely respond to the provocation.
September 1922
The defense minister wants 15 new destroyers building. I don’t intend to have that many going at once, but I am willing to take his money and try a new design.
The Glaive class has six torpedo tubes, four turrets in a superfiring-fore-and-aft arrangement, mines, and a moderately heavy anti-aircraft armament.
October 1922
We’ve secured a new colony in Albania! The only problem is that it bumped tensions with Germany considerably above the halfway mark.
January 1923
All in all, a quiet two years, although war with Germany is looking increasingly likely.
Interlude: Fleet Exercise
I wanted to show some of the ups and downs of early carrier combat, and the fleet exercise is a natural way to handle that. Pay a bit of cash, get some fleet experience in return.
Money is a bit too tight for that, though, so I’m going to savescum it as an exercise in battle-writing. In-universe, we’ll say it’s junior staff officers messing around with chits and a mapboard.
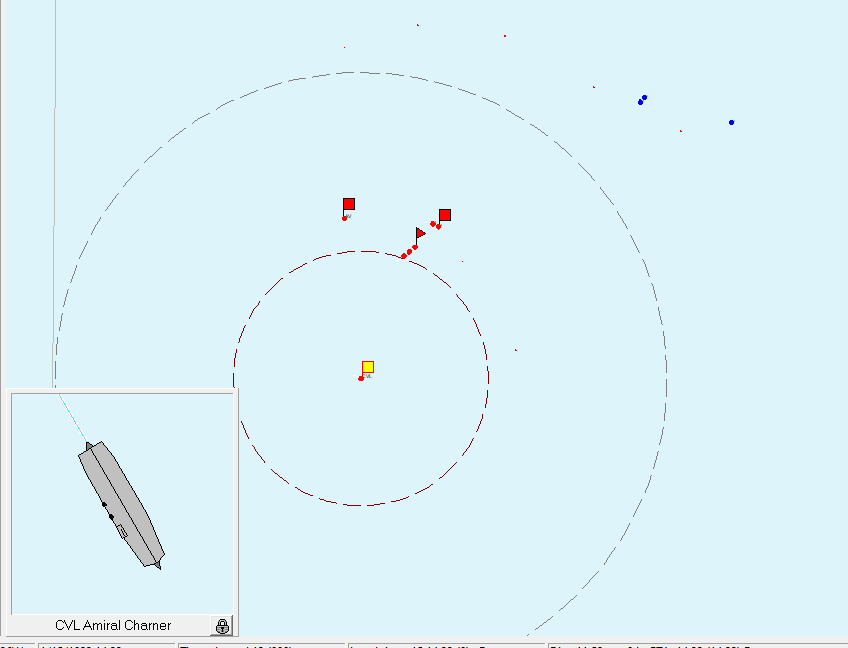
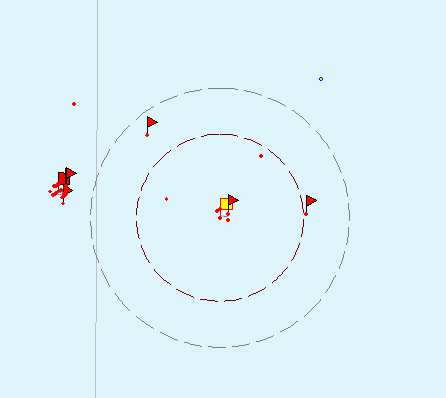
1:20 p.m.
Amiral Charner, our lone CVL, cruises in company with two light cruisers, three destroyers, and a seaplane carrier. Altogether, they are Team Red. The enemy fleet, Team Blue, is Redoubtable, a mid-tier battleship, and an exact mirror of Team Red’s supporting force.
We’ve started at standard range, because this whole aircraft carrier thing is very new, and we’re not sure how it’s going to play out.
As a quick reminder, Amiral Charner‘s air group is eight fighters and fourteen torpedo bombers.
Given that Team Red knows Team Blue is in the area, Amiral Charner prepares a strike. She has room on deck to spot thirteen planes. I expect we’ll have the enemy in sight before crowding out our CAP becomes a problem.
1:33 p.m.
Our light cruisers, ten miles in Amiral Charner‘s van, spot the enemy. The carrier and her supporting seaplane carrier turn away, while the light cruisers prepare to run interference—and hopefully spot the enemy battleship.
The red specks are aircraft formations.
The wind is out of the east-northeast, problematic given the range and location of the enemy forces.
1:55 p.m.
The light cruisers spot an enemy ship sailing a) toward the battle and b) solo, which is probably the battleship.
2:30 p.m.
The light cruisers and scouts confirm that it is indeed the battleship.
A strike takes a little while to ready and spot, and in the meantime, reconnaissance aircraft and CAP planes are returning, clogging the deck.
3:45 p.m.
By the time that the deck is clear, and that your intrepid correspondent remembers that he has to check the boxes next to the aircraft rows to actually give them orders, not just highlight the rows, the opportunity is lost. The January sunset fades into a wintery night, and the scenario ends without combat.
We’ll try this again in the summer, provided we aren’t at war with someone by then.
Plans and Intentions
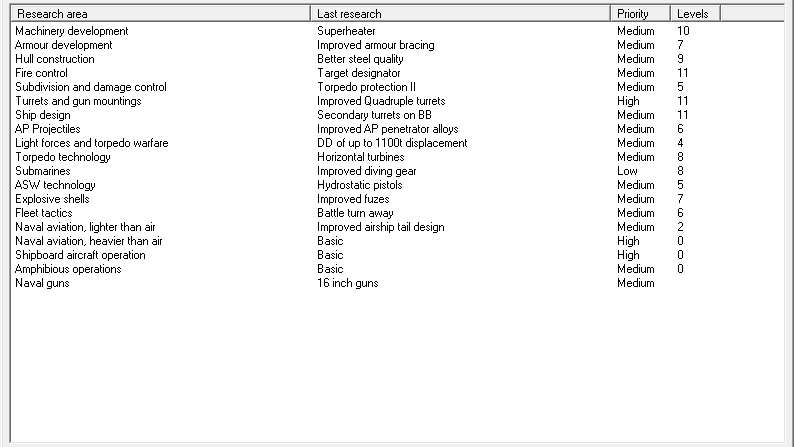
Research
We uncovered two major technological items: improved directors on the fire control front, and torpedo protection 3, which adds (still more) weight but protects better against torpedoes.
Our current research priorities are naval aviation, anti-submarine technology, and turrets and gun mountings. Should we leave it that way, or focus on other items (light forces, guns, amphibious operations, machinery and hull design, other things)?
Shipbuilding
Ocean is nearly complete—she’ll be ready in three months. Should we build a slightly improved version when she’s done, improving her fire control and torpedo protection?
Should we perhaps build a battleship with an eye toward survivability in the coming age of aircraft? That is, heavy deck armor, lots of room for anti-aircraft firepower, and battlecruiser speed? Should we hold off on more battleships altogether?
Soon, we’ll be able to convert ships to full-size carriers. The 24-knot Duquesnes seem like perfect candidates—their machinery is very old, so giving them reasonable speed should be easy, and they have the displacement to support an air wing of decent size.
Other ships on the ways include Commandant Teste, our large seaplane carrier, three light cruisers to take over some colonial duties, and three Glaive-class destroyers (with minelaying technology!). Should I build another seaplane carrier, or lean harder on the light forces?
In more general terms, at present, our destroyers are about 35 knots, our light cruisers and battlecruisers go 27 to 29 knots, and our battle line goes 22. Is it worth rebuilding the slower ships in the battle line (the Redoubtables, Requin) to get their speeds up to, say, 24 knots? Should I push for faster light forces?
Diplomacy
France is again a middle-tier naval power:
Germany has an edge on us if you count dreadnought ships in total. The US and the UK are both far ahead. Austria-Hungary, Italy, and Japan are clearly inferior.
Tensions are middling. Germany is rattling sabers again.
With social distancing in full swing and last week’s break, I had plenty of time for a two-year update, and it’s an eventful one.
January 1917
Four ships go into the yards for a rebuild: Tourville and Dunkerque, the two remaining Duquesnes, along with Redoubtable and Marengo, our second-generation dreadnought battleships. Per a reader note, we have the time and budget. The Duquesnes, for whatever reason, will be in for a year—perhaps being overhauled because of their age?
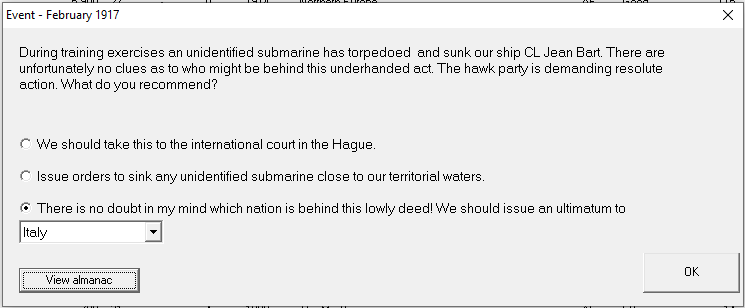
February 1917
Or do we?
I’ll issue the ultimatum to Italy; they’re nearby, and we can totally take them.
Tensions are high, but not to the breaking point yet. I order the rebuilding of our battleships accelerated.
March 1917
French naval engineers have managed to come up with a quality 9″ gun, which means it’s time for a heavy cruiser.
Thoroughly modern-looking! We’ll have to get a few into production.
July 1917
No change on the tension situation, but with design studies now complete on the Montcalm class, the first one enters production, with the next to start in August.
August 1917
Just in time for a new ship class to enter service and most of our battleships to finish a rebuild cycle, we develop anti-aircraft guns.
October 1917
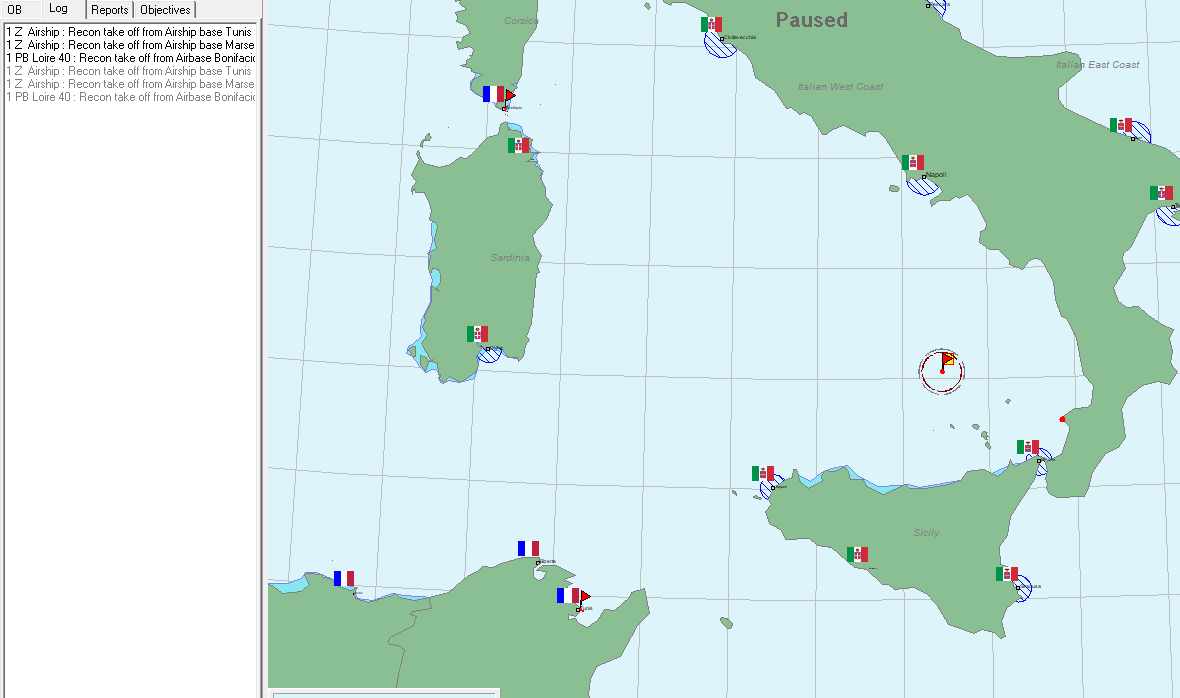
The Italians couldn’t stand our repeated provocations. War begins.
The first battle of the war: a raid on enemy coastal installations. It’s just after midday. One notable new thing is the presence of aviation elements: floatplanes from our airbase on Corsica, zeppelins from the base at Tunis (which could stand to have an airfield, I think).
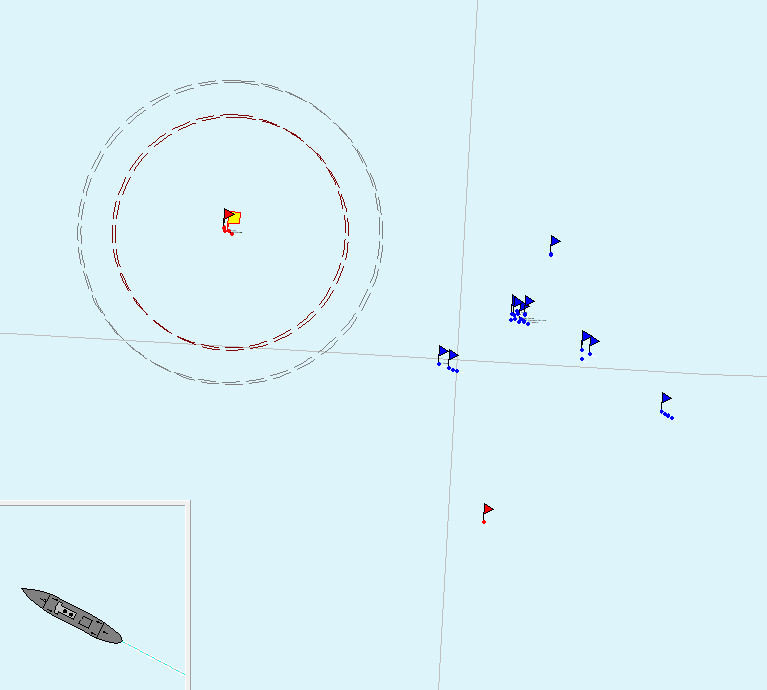
Our forces are the fast battleships (ex-battlecruisers) Lyon and Marseilles, each armed with 6 15″ guns and capable of 24 knots, escorted by five destroyers.
Happening upon two old armored cruisers, the Lyons, unblooded in the last war, prove their worth quickly. Seven hits on one of the Italian cruisers and eight on the other prove sufficient to sink the two old ships.
Either French gunnery or French technology has improved sufficiently to score hits dealing critical damage to the enemy at something like 20,000 yards.
The enemy fleet was out in force, however, and when the fog of war lifts at the end of the battle, we find them not too far behind us.
November 1917
The Italians decline a fleet battle—probably the right move, in view of our overwhelming superiority.
December 1917
And again, they decline a cruiser battle.
January 1918
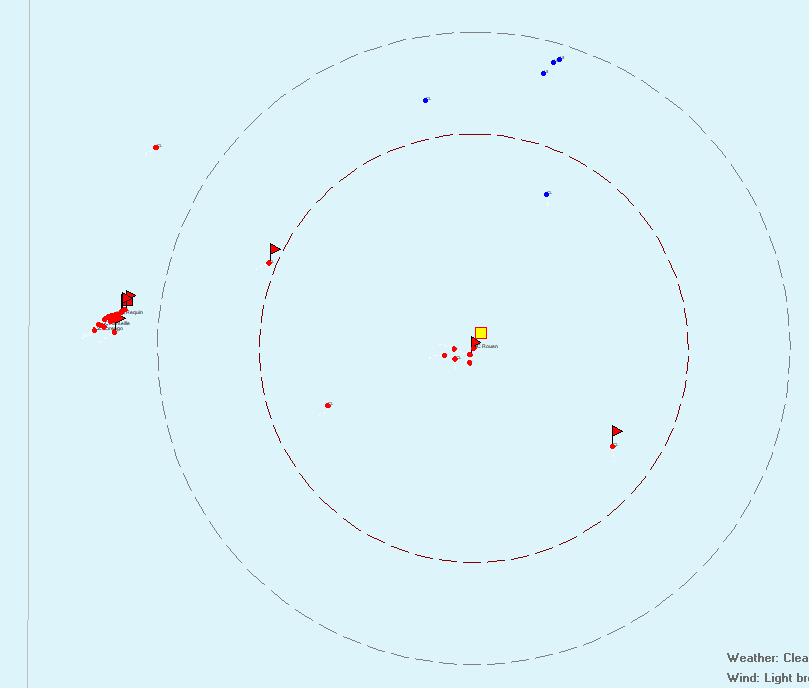
The French fleet sorties in response to an Italian coastal raid. It’s a beautiful morning, and the enemy is in sight.
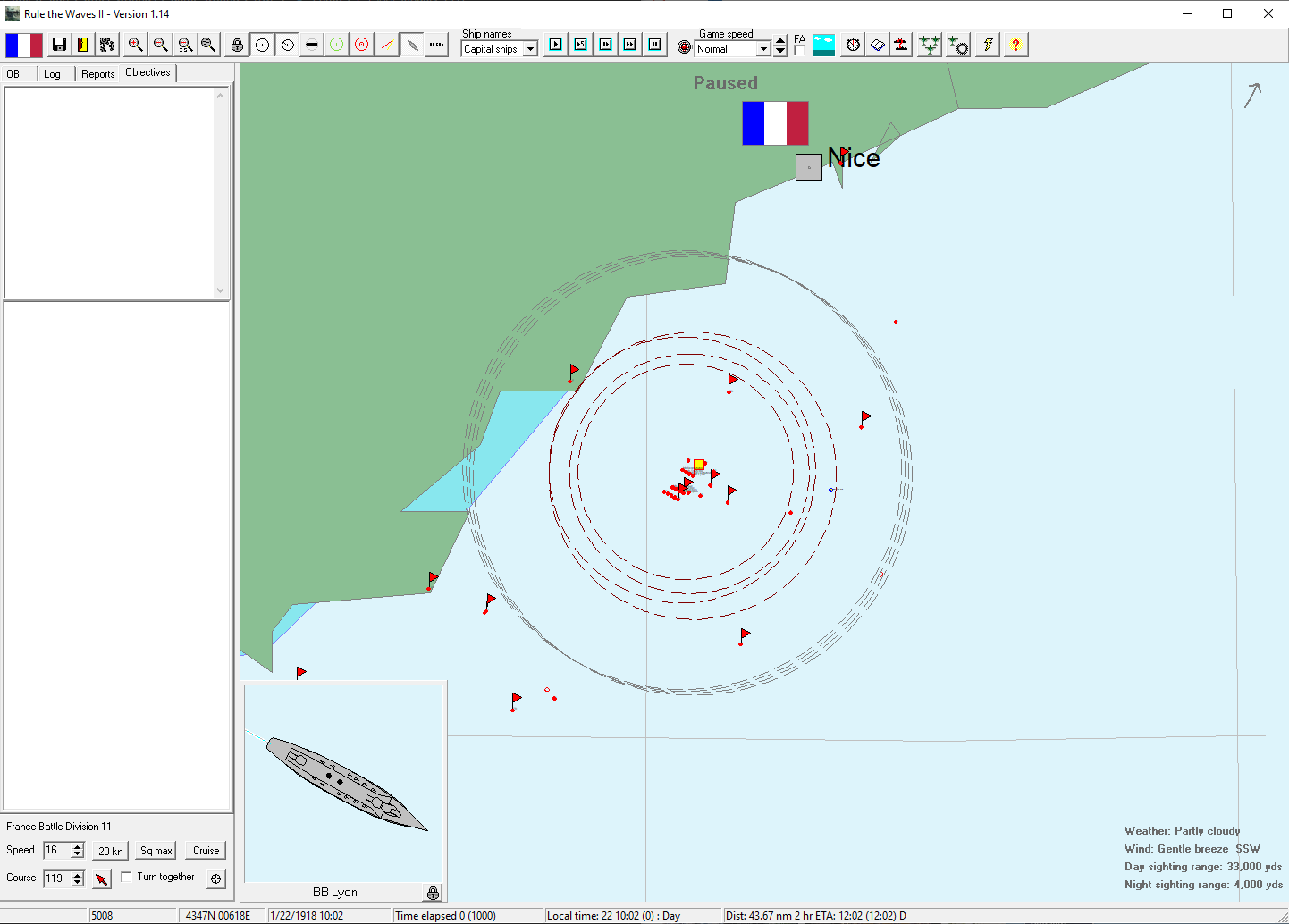
The Battle of Nice
On the field today are eight French battleships (four of which were originally battlecruisers, reclassified after their last rebuild), one battlecruiser in the scouting force, a bevy of light cruisers and destroyers, and a number of aircraft. The weather is partly cloudy with a gentle breeze out of the southwest.
10:08 a.m.
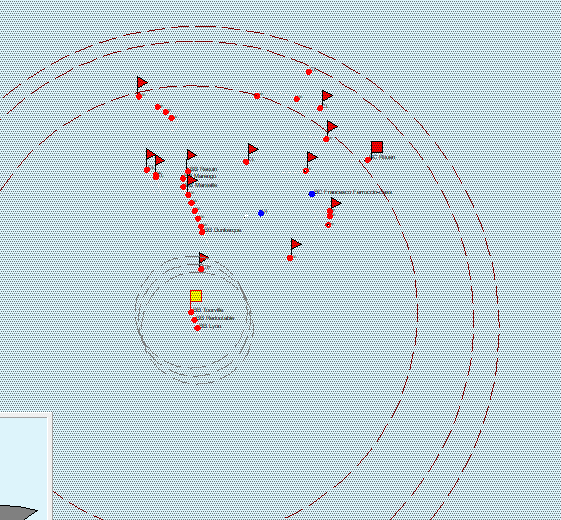
The situation is already favorable: the Italian fleet is divided, with the battlecruisers to the east of our fleet and the battleships to the south. As I recall, the Italian battleship line is slower than our own, so that’s where my focus will be at first.
… the aftermath (or is it?)
In the final reckoning, it goes down as a boring battle. The Italians are faster than we are all around. Their battle line escapes. We sink an old pre-dreadnought, exchange a lot of shells to no great effect, and turn away as the Italian fleet does the same, both battered, none reduced.
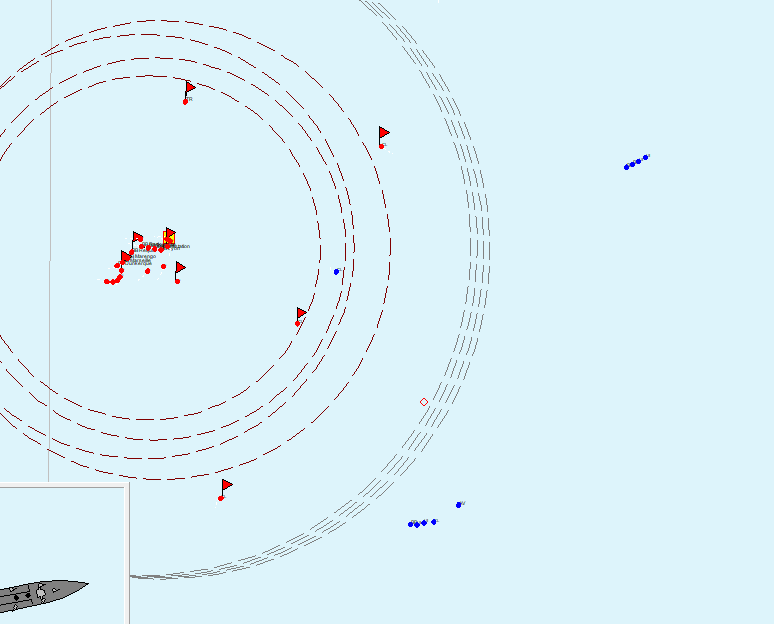
Except that’s not what happens. Overnight, on the 12-knot journey back home, we come across one of the Italian Francisco Ferruccios, which blows up in a flash fire.
Then, shooting between our scouting force and our main force comes the entire Italian battlecruiser squadron.
At 4,000 yards. At night. Into our swarm of 20-some destroyers.
The carnage is incredible. At the end of the day, all four Italian battlecruisers lie on the bottom of the Mediterranean, against zero French warships lost. Merest happenstance made it happen—the Italians, pushed to the southwest, made a high-speed run toward the coast to attempt to evade us in the night, and chanced to run right into us, at the range where our superior number of destroyers gave them no chance to escape.
February 1918
Italy makes a historical blunder.
The month’s battle is a coastal raid; the lone French battlecruiser Rouen takes a little jaunt in toward Italy, supported by a division of three battleships, blows up a bombardment target, and returns to Nice. Another thousand victory points, nice and easy-like.
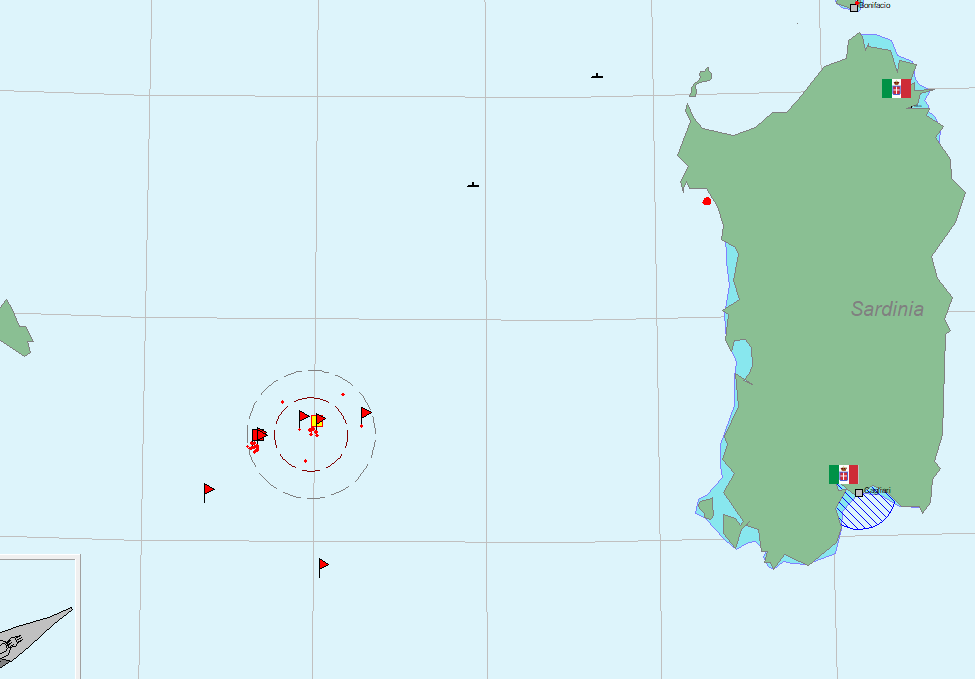
Italy being close to France, we’re actually within invasion range. We’ll target Sardinia, which would be a wonderful feather in our cap and a second unsinkable aircraft carrier in close proximity to the Italian coast.
March 1918
Evidently, the invasion planning process is faster than I had hitherto realized. It’s the early afternoon of March 29th, and we’re approaching the western coast of Sardinia with an invasion force in tow.
The Invasion of Sardinia (1:37 p.m., March 29)
I’m going to have to mark this one up a bit.
Update: I forgot to mark it up before uploading it. I’ll just have to be better at describing things.
Selected: the scouting force. The battlecruiser Rouen is joined by a pair of modern light cruisers and five destroyers.
West-southwest of the scouting force: the main fleet. Our three most modern battleships (Requin, sole member of her class, plus Marseilles and Marengo), along with supporting light cruisers and destroyers.
South of the scouting force: the support force. Three older ships (Devastation, Tourville, and Dunkerque) serve as distant escort to six transports.
Southwest of the scouting force: the invasion force. Six transports, of which four have to reach the Sardinian coast for this mission to count as a success.
On the Sardinian coast: our objective marker, along with submarines assigned in support of the fleet.
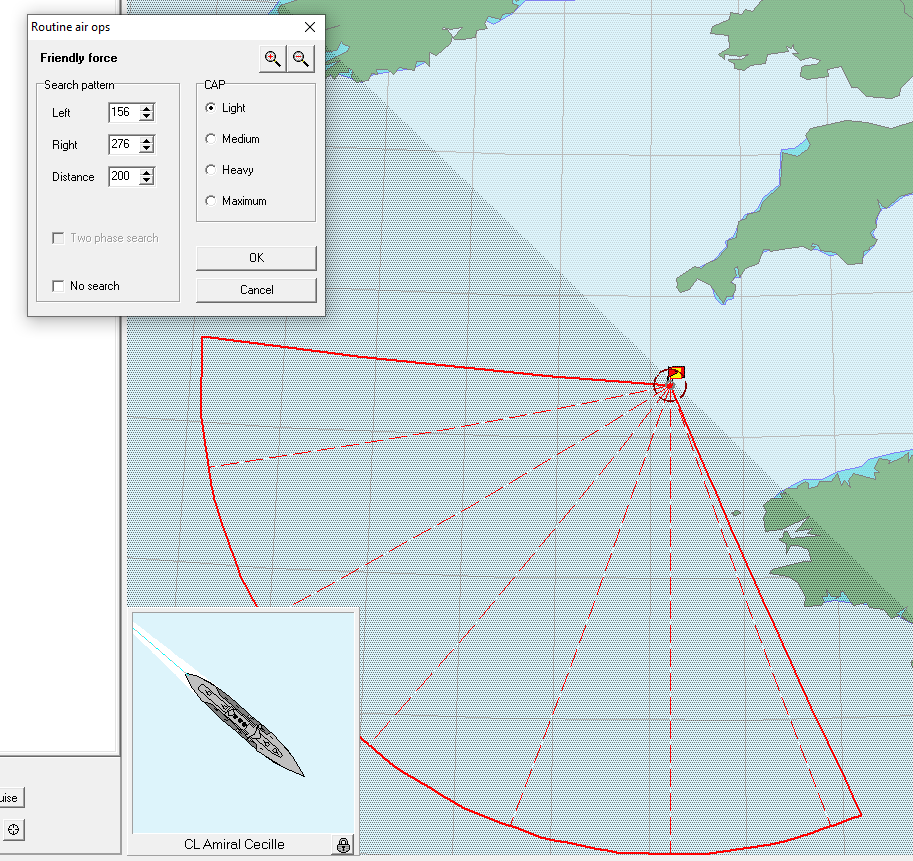
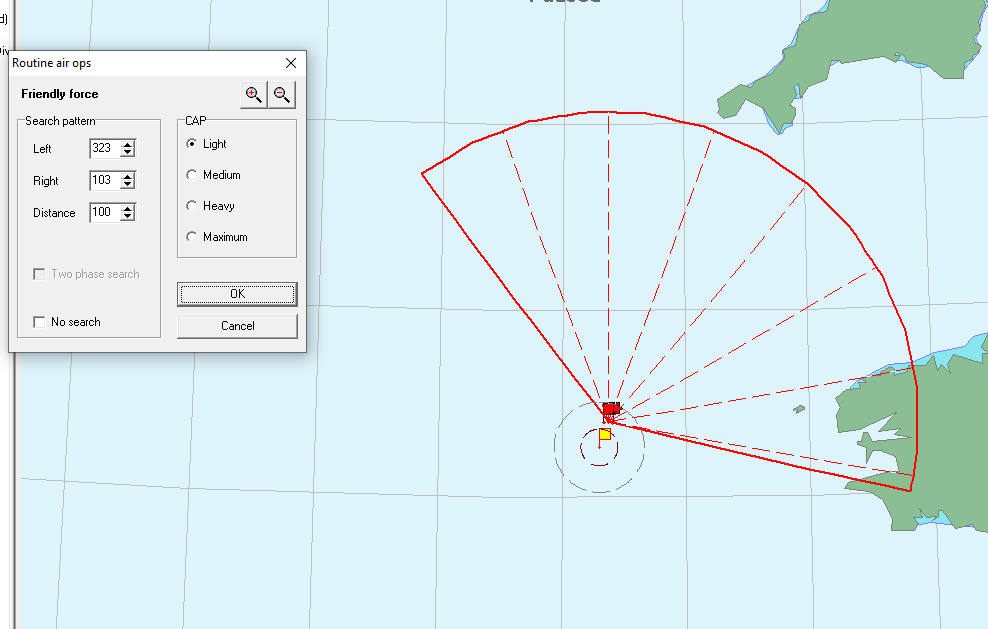
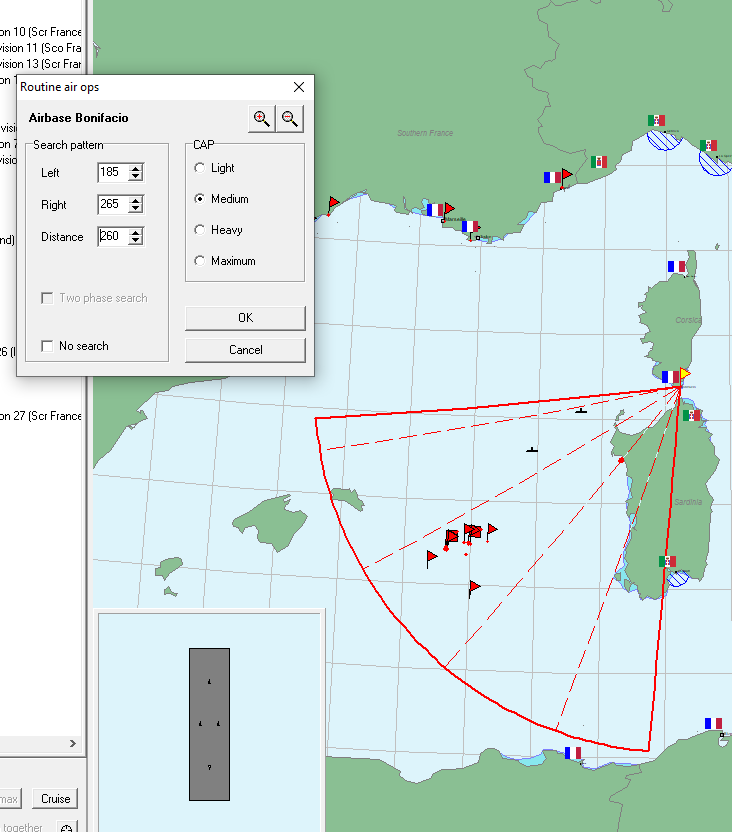
New things to worry about: aerial scouting! Ordinarily, the defaults are good enough, but in this case, with the enemy’s likely approach routes well-defined, I’ll tweak things a bit to see that we catch them.
2:00 p.m.
The two forces under my direct command (the main force and the scouting force) split off to the north and east of the northeastward line of advance the transports will have. They’ll form a sort of search line, keeping the sea between them in visual range while positioning themselves to make a quick dash to the flanks if need be.
2:47 p.m.
Aerial reconnaissance being, in 1918, rather a slow affair, our ships spot the enemy first.
3:00 p.m.
A second light cruiser appears. A search line, perhaps?
At this stage, the goal is to find and engage the enemy before dusk, after which he’ll have a much easier time of getting in among my transports. Rouen leaps forward, turbines whirring up to speed as she accelerates to her maximum 27 knots.
3:22 p.m.
What passes for the Italian battle line comes into view.
3:39 p.m.
Rouen opens fire, aiming to pass to the east of the enemy battleships, where she can keep tabs on them into the evening.
The main force closes toward gun range.
3:42 p.m.
Requin scores with her first volley.
These Italian dreadnoughts are of the Andrea Doria class, rough contemporaries with our Duquesnes. They’re armed with ten 13″ guns, and can fire a maximum of eight of them broadside. Our Requin, though it only has 12″ guns, mounts twelve, and can fire all twelve at a broadside target.
Armor, however, is where we really look smart. Requin has a 14″ belt. The Andrea Dorias have 9.5″. Even Rouen, our notional battlecruiser, is more heavily armored.
3:52 p.m.
The fleet is nearly perfectly placed for this battle, running on either side of the Italian ships at long range. Although Marengo can only make 22 knots, the rest of our fleet can keep up with or surpass the Italian dreadnoughts in speed.
4:52 p.m.
The Italian light cruisers, off to the northwest, try an attack on the battle line. We’ll see if they manage to get through the screen.
The Andrea Dorias are both down to around 10 knots now.
5:46 p.m.
One of the Andrea Dorias goes up in a flash fire. At 5:53, the other follows in the same manner.
19:22 p.m. (and overnight)
Night sees the remains of the Italian fleet scatter. We manage to find the transports, taking up station on either side to cover them through the night.
Aftermath
The invasion is in progress. Soon, hopefully, Sardinia will fall.
April 1918
The invasion doesn’t take long to bear fruit. Sardinia is ours.
May 1918
Stubbornly refusing to surrender, the Italians lose a pair of light cruisers to Rouen, who proceeds otherwise unopposed on a coastal raid.
June 1918
Well now, what’s all this about?
And, in news concerning the unluckiest name in the French Navy…
This is the third Lavoisier lost in combat. Who wants to skipper the next one?
July 1918
Now that CVLs are on the table, our last Gueydon class (Amiral Charner) gets a rebuild as a light aircraft carrier. Replacement machinery increases her speed to 26 knots, and she has room for an air wing of 22. She’ll be ready in a year.
Tensions are on the rise with Germany, but the sympathy of the world is with us.
August 1918
A quiet month; the Italians don’t even bother stopping a raid on their coast by a pair of light cruisers.
September 1918
The Italians move to raid the French coast, at which time the French fleet comes out to play.
In particular, Rouen comes out to play; the battlecruiser is as fast as the Italian light forces, and easily sends them to the bottom with accurate fire from her 12″ guns.
October 1918
Rouen and escorts attack an Italian convoy, which is defended by a single destroyer. Thirteen merchants sink.
November 1918
Two light cruisers raid the boot of Italy, coming within about twenty miles of Taranto, sinking two corvettes and returning to Greece (also a French possession, if you’d forgotten).
There are rumors of falling morale in the Italian fleet.
We begin construction of air bases in Benghazi, Libya and Patra, Greece, which will provide coverage of the west coast of Italy.
December 1918
I put in a request to France’s aircraft manufacturers for a torpedo bomber, something to give the air fleet some teeth. After that, we’ll update the fighters. See the end of this post for some questions on aircraft design priorities.
The month’s battle is a raid on the Italian coast. Rouen takes a torpedo, but since she’s a modern warship with good torpedo protection, she’s fine. We sink the destroyer that launched it, too.
Spies deliver blueprints of one of the Italian heavy cruisers under construction: slightly superior to our own in armament, but one knot slower.
January 1919
In this last month of the update, I start planning an invasion of Eritrea, which is, I believe, the last Italian territory small enough to invade. The battle is a convoy attack, in which we sink almost the whole convoy again.
Two-Year Report: Status
Money is a bit tight, with the invasion of Eritrea costing about as much as a low-end heavy cruiser would, but I’m not especially concerned. The fleet is in tip-top shape. Under construction is Rouen‘s sister ship, a trio of Montcalm-class heavy cruisers, one more Troude-class light cruiser, Amiral Charner‘s reconstruction, and the last of a class of corvettes designed to supplement the remaining Francisques.
Our prestige is at an all-time high.
Two-Year Report: Diplomacy
Tensions with Germany are high, but when the war with Italy ends (provided Germany doesn’t jump in), they’ll reset.
Plans and Intentions
There are a few things on my list:
Continue to try to find an ally. I’m not sure if there’s anything I can do on that front beyond just being nice to people.
Build out our aircraft carrier capabilities.
Build a new, 14″ dreadnought battleship, possibly retiring the old Duquesnes or converting them to aircraft carriers, as time and budget allows.
Build a new class of destroyer, mounting the recently-invented depth charge.
Begin refitting older ships with anti-aircraft guns.
How should those tasks be prioritized? Should any of them be dropped? Should others be added?
I mentioned something about aircraft priorities earlier. When soliciting aircraft designs, we can pick among a number of priorities: speed, maneuverability, range, toughness, firepower, and reliability. We can further pick two to focus on. Which two should we focus on?
On the advice of the readership, I’m doing two things with an eye toward saving money and modernizing our forces:
Bringing home the last of the Tages on overseas service and scrapping them. Being obsolete, they cost more to maintain—a substantial fraction of a new dreadnought’s maintenance. In their place, I’m going to send the remaining Chateaurenaults overseas, since that was their original purpose.
Scrapping two more Gueydons. They were never very combat-effective, and the Tridents will make better aircraft carrier conversions anyway.
I’ll likely aim to build more light cruisers and destroyers in this update, although I also intend to keep one or two dreadnought-type ships on the ways to avoid falling behind in the arms race. A two-Mediterranean-power standard is probably not quite within our grasp, but I want to at least give it a try.
February 1915
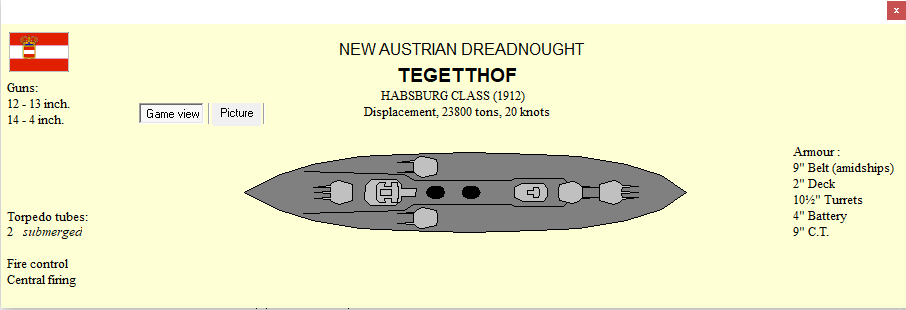
Blueprints for the Austrian Tegetthof-class, under construction, hit our desk. One thing to note is the relatively light armor. I’ve adopted the (real-world) German philosophy that a ship’s first business is to stay afloat, and so far that’s worked out.
Our two French naval engineers at the Parisian cafe have had the bright idea of a ship dedicated entirely to floatplane scouting. That option is open to us now, but I think I might be more inclined to request proposals for a floatplane scout, and then equip the next class of battleships with one.
August 1915
It has been an exceptionally quiet few months. A few ships enter service, including the first batch of four of the new Harpon destroyers. Another six are on the way, along with three more of the new(ish) Lavoisier light cruisers.
Both designs are a little long in the tooth now, so the next batch of destroyers and light cruisers will be to a newer one.
October 1915
Rising tensions in the Balkans (Germany again…) yield the budget to develop a newer class of 5900-ton light cruisers. The Troude is not armored as well as the Lavoisier, but has more torpedo tubes, more guns, and one knot more speed, necessary for her to keep ahead of some upcoming battlecruiser types.
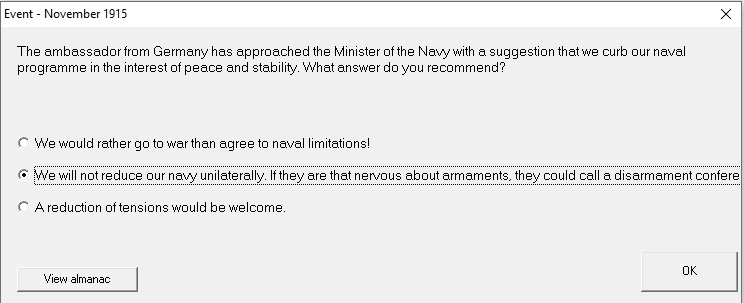
November 1915
Germany asks us to reduce the size of our shipbuilding program. I choose the more polite of the two ‘shove it’ options.
It, uh, backfires a bit. An arms treaty goes into effect, limiting all powers to ships of 15,000 tons or less and main guns of 10″ or less.
While this isn’t ideal, it does mean we’re in third place behind Britain and the United States in the dreadnought race, and we’re going to be until 1935. On the downside, our medium gun research is not great. Our 8″, 9″, and 10″ guns are all -1 quality, and I don’t think it would be wise to build a new pocket battlecruiser around those calibers yet.
December 1915
Scrapping the illegal ships under construction makes us a ton of money, and with it, I embark upon quiet a large modernization program. We have five new light cruisers building, and twelve new destroyers, along with ten new submarines. It also seems like a decent opportunity to build a seaplane carrier or two. After all, we aren’t spending it on very much else.
February 1916
At last, something to upgrade our battleships with.
A program of airbase construction yields two: one on the south end of Corsica, to cover the west-central Mediterranean and French home waters, and one in Brest to cover the Atlantic coast. At present, each one houses a squadron of 10 fighters and a squadron of 10 flying boats.
Along with the air wings for the two seaplane carriers under construction, that gives us 50 naval aircraft, a world-leading total.
August 1916
Funds are a bit tight as our battleships go through the rebuild process, but we’re staying ahead of the game.
Now seems like a good time to spring for enhanced gunnery training. We have a large and powerful battleship fleet we can’t replace for another 231 months, and the last thing we want to do is lose it because of poor shooting.
January 1917
An exceptionally boring two years (with the exception, perhaps, of the naval treaty) comes to a close.
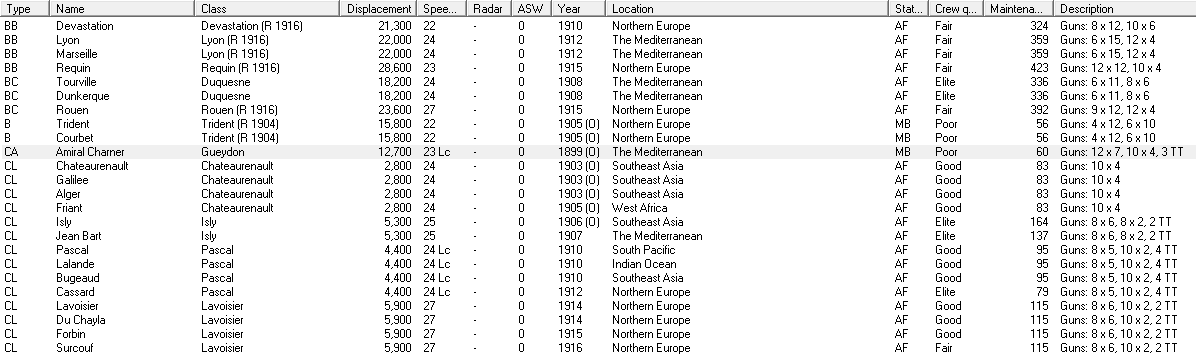
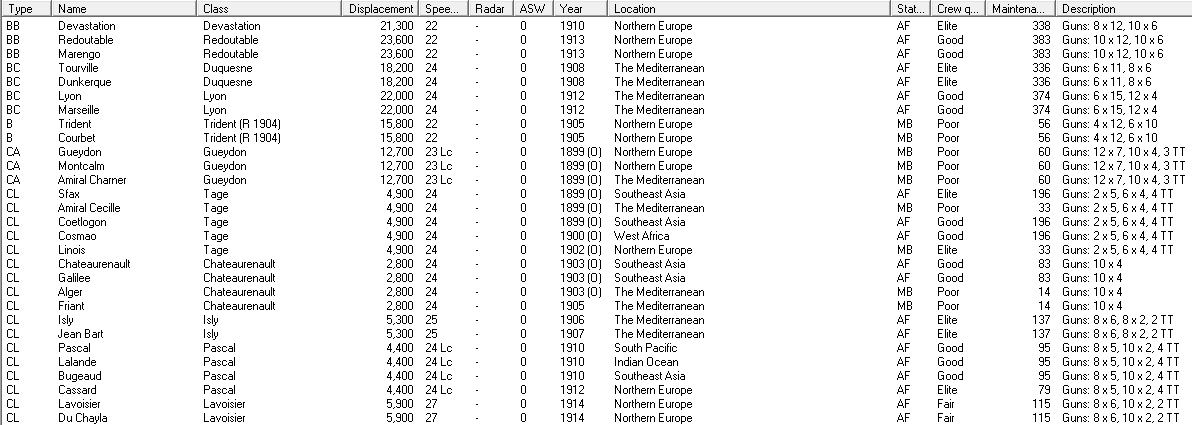
Fleet Summary
Here’s our list of non-destroyer ships in current service. Of note, the two Redoubtables are missing because they’re being updated to director firing. Also, Lyon and Marseilles, originally constructed as battlecruisers, are now counted as battleships—24 knots is no longer battlecruiser speed.
That means that Tourville and Dunkerque will end up counting as battleships, too, when we rebuild them, unless I take the opportunity to upgrade their machinery for better speed. (If we want to do that, we should probably wait until 1920—we’ll be able to turn them into oil-burners, which will make them faster.) So, should I let them turn into battleships, upgrade their fire control and machinery now, or defer an update until 1920?
Also noteworthy: our original Tage-class light cruisers have all been retired, leaving the still-elderly Chateaurenaults as our primary source of overseas influence. New Lavoisiers and Trondes are on the way. It may eventually make sense to build another overseas-service light cruiser with extended range and colonial service equipment, especially given the lesser demands on the naval budget.
Finally, as for destroyers, we have 16 modern Harpon-class ships in service now. The older Pistolets and Balistes join them in active service, while the remaining Fauconneaus and Francisques are mothballed, ready for activation in case of war to take on trade protection duties. (Destroyers cost so little to maintain that there’s no reason not to hang onto them for this use.)
Under construction, we have the two Redoutables, as mentioned earlier, along with five new light cruisers and two seaplane carriers.
Future construction plans are a little up in the air. The naval treaty means we can’t build any new dreadnoughts. The 15,000-ton limit is pretty restrictive, and suggests that a new heavy cruiser program might be in order. A top-of-the-line, 28-knot, 9×10″-gun cruiser (the latter characteristic being the largest caliber armament allowed, the former being faster than the pre-treaty battlecruisers still prowling the seas) costs about 2,200 funds per month, but our 10″ guns are still -1 quality. That makes them quite a bit less attractive. Should we forge ahead with heavy cruisers anyway, wait for research, or ignore the type altogether?
I plan on upgrading our battleships to oil fuel one or two at a time when oil becomes generally available, which will save on machinery weight and allow me to increase their speed (or, alternately, add anti-aircraft guns when we figured that out).
One unexpected outcome of the naval treaty is that we’re comfortably third in dreadnought ships behind England and the US, and will be for some time to come. The timing worked out very well for us.
Diplomacy Summary
Tensions have been creeping higher with Germany again, which is both good (our battle line is better than theirs because the treaty halted their building program too) and bad (we don’t have England to help out this time).
Austria-Hungary remains resolutely immune to my many and varied provocations.
Progress has been limited on locating a new ally.
General Summary
As I mentioned, we’re spending money on gunnery training for the first time, and our naval aircraft budget line item is slowly beginning to grow.
Our prestige remains at an all-time high. I elected to skip dock expansions for the time being, given that we can’t use them.
Final Notes
It’s likely I’m going to miss next week—this weekend is a very busy one, and I don’t know if I’m going to have the time to get in two years of gameplay in the middle of it all.
Sorry for the unannounced skip last week—I had a lot to do and a small amount of time to do it.
January 1913
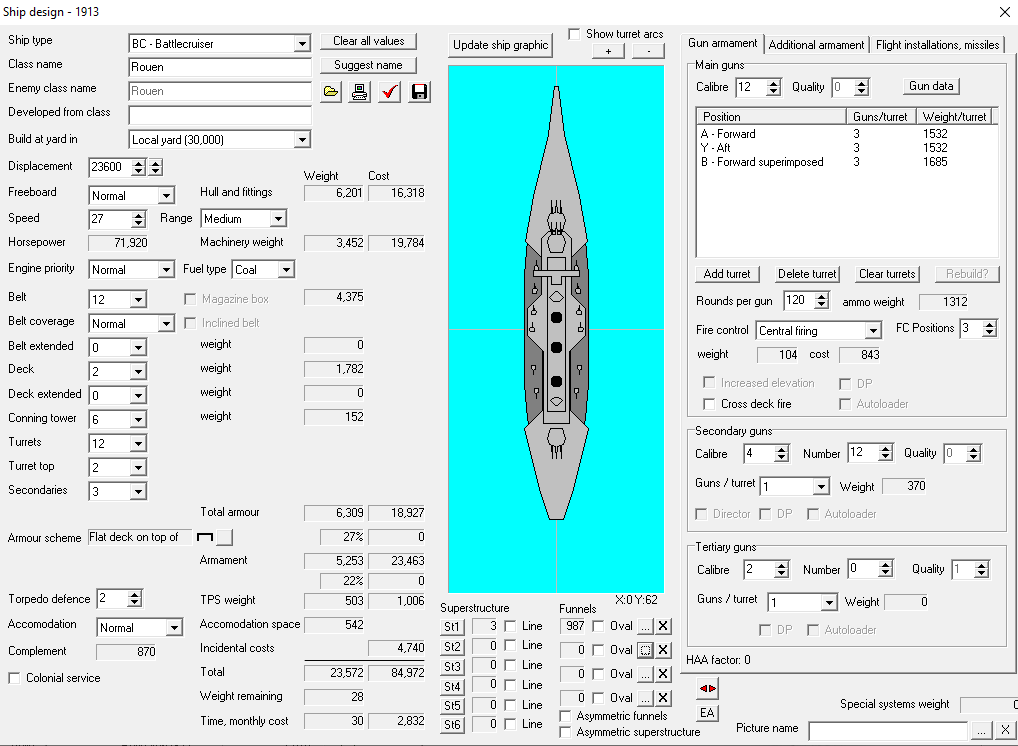
With no serious objections to the idea, I come up with the (slightly) budget-minded Rouen-class battlecruiser.
27-knot speed will make her one of the fastest heavy ships afloat, and 9 12″ guns mean she won’t lack for punch.
February 1913
The battle of the month is a coastal raid in the North Sea. Combined French and British forces scour the seas for German merchants, sinking one along with an escorting corvette, but come across no other foes.
March 1913
In unfortunate news, our Redoubtable-class battleships have trouble hitting their design speed. Happily, that design speed was 23 knots instead of 22, so they’re still as fast as the rest of our battle line.
The battle of the month is an enemy raid on our shipping.
The English Channel is a dangerous place to be if you aren’t English or French—heavy minefields protect the narrows. (The little red dots indicate mined areas. This is what the large blue circles around German ports, if I’ve taken a picture of them, would have looked like to a hypothetical German player.)
It turns into a knife-fight just after dusk, which is a bad situation for us. Our superiority is assured; there’s no reason to waste our big ships on fights where torpedoes can sink them too readily. (The big advantage of the upcoming R-class battleships and battlecruisers is that they ship torpedo protection, armor against the devilishly-powerful underwater weapons.)
Reluctantly, like Jellicoe at Jutland, we turn away. Perhaps we’ll be able to catch up to that damaged armored cruiser in the bottom left of the screenshot later.
Or not! That neatly solves that problem.
Suffren eats a torpedo despite our evasion, but doesn’t seem critically damaged.
The French fleet pursues the fleeing Germans north through the night, but doesn’t find them in the morning, and so turns back to Dunkerque.
April 1913
Our brothers in arms do a thing!
Picture two French naval engineers at a Paris cafe, a bottle of wine between them, cigarettes propped on the ashtray, smoke twisting lazily toward the darkening sky: “I wonder if zis will ever catch on.”
The battle of the month is a convoy defense in the Bay of Biscay. Three Allied light cruisers face two Germans, sinking one of them.
May 1913
The Germans win a cruiser action, sinking the old Tage-class light cruiser Surcouf with a torpedo.
June 1913
The Germans win another light cruiser action, though this time without sinking anything.
July 1913
Another inconclusive North Sea battle, this one tipped very slightly in the direction of the French.
The vast German cruiser force is slowly shrinking as its ships, far from decent bases, succumb to lack of coal and mechanical issues and find themselves interned in neutral ports.
August 1913
The Germans attempt to raid the coast near Dunkerque. Today, we have Redoubtable with us, the first of our second-generation battleships.
The German forces amount to a trio of light cruisers, which escape, and six destroyers, three of which sink. Redoubtable‘s gunnery was… not great, but at least she’s been blooded now.
September 1913
A raid into the Heligoland Bight nets a pair of merchants and one of three fleeing German light cruisers, struck by a shell from Redoubtable at almost 18,000 yards, which slowed her enough to bring her under the squadron’s guns.
Germany and Italy both seem to be investing heavily in submarines: Germany has 9 and is building 30, while Italy has 20 and is building another 29.
October 1913
The Germans agree to a crushing peace deal. Good for us in the long run. Not so great in the short run—our budget is cut very nearly in half.
We get six points to spend on territory and/or reparations. I opt for two worthless (0-point) Pacific colonies, and leave the rest for more reparations.
November 1913
Frantically scrapping the most obsolete of our pre-dreadnoughts (the 22-knot Tridents will make either good aircraft carrier prototypes or good battle line filler, given that a line faster than 22 knots is still some time into the future, but all of the La Républiques get the axe), mothballing other ships, and halting construction of one of our new dreadnoughts, I manage to get the budget vaguely under control. I’ll still have to toggle the other dreadnought on and off.
December 1913
Sure thing (especially since the result is ‘more budget’).
French engineers have developed quality-0 14″ guns, so it may be in the cards to scrap our second Requin altogether and prepare a new class with 14-inchers as our standard going forward. Our 12″ guns are very good, but bigger, in this case, is always better.
March 1914
The budget is finally balanced enough for my liking, so I start a third ship in the new class of Lavoisier light cruisers and scrap the in-progress Colbert (the second Requin). When Requin herself is done, I’ll likely start on a new battleship—although you’ll have a chance to weigh in before then.
June 1914
The Naval Minister comes to me with the suggestion to build 15 new submarines. This time, I’m actually on board, and even better, the budget bump is enough to pay for 15 submarines and a quartet of new destroyers.
August 1914
Our alliance with Great Britain comes to an end. It was good while it lasted.
In other news, while scrolling through the technology list, I discovered that quadruple turrets are on the table now—a classic French design feature.
September 1914-January 1915, Update Wrap-Up
I appear to have lost my notes for these few months, so I’ll take care of everything all at once.
The only really interesting development in technology is improved quadruple turrets, which eliminate the reliability penalty and open the door to all sorts of interesting forward-main-armament ships.
Italy has developed flying boats, the first of the major powers to deploy military heavier-than-air aircraft.
Diplomacy
Tensions are low all around. We’re spying on the Austrians, the Italians, and the Americans (the latter only to see what the higher-tier powers are up to in terms of technology and design).
Technology
Here’s where things stand. According to the almanac, we’re in the middle: Germany, Britain, and the United States are ‘very advanced’; France is ‘average’, and Japan, Italy, and Austria-Hungary are ‘backward’. Our dock size, at 31,500, is a bit behind. When the submarines finish building in seven months, I think it’s time to invest in a few dock expansions in succession.
The Fleet
We have seven dreadnought-type ships: two of the early Duquesne-class battlecruisers, two Lyons (which ship the fleet’s heaviest guns), Devastation (our first dreadnought battleship), and two Redoubtables (our most recent dreadnought battleships).
We’ve retained two Tridents and three Gueydons, all of which will make fine aircraft carrier conversions when the time comes for that.
In addition to the pictured units, we have 27 destroyers of various types. The large majority are the obsolete Fauconneau class, which I’m tempted to retain as coastal protection ships—immediately putting them all into Trade Protection status when a war breaks out. They’re in mothballs currently.
As far as other destroyers go, we have three Francisques (also in mothballs, also something of a liability in wartime owing to their 28-knot speed), two Pistolets (31 knots), three Hallebards, and four Balistes. Some replacement destroyers are relatively high on the list. Our light cruiser force is also in the ‘large but obsolete’ category. (This was not unknown in the real world. Dreadnought construction sucks the air out of a great many other kinds of shipbuilding.)
Under construction, we have the Requin, a battleship with 12 12″ guns and a 14″ belt, the Rouen, a battlecruiser with 9 12″ guns, 12″ armor, and 27-knot speed, a pair of the new Lavoisier type of 27-knot, 6″ gun light cruisers, four new 1,000-ton, 33-knot Harpon-class destroyers, and 15 submarines.
Prestige and Finance
We are currently in the very good graces of the French government, with 35 prestige. Our monthly budget is 16,883 funds, of which a mere 4,878 goes to maintenance, while 10,593 goes to new construction. Research (12%, 2,026), naval aircraft maintenance (256 for 16 airships), and spying round out the budget.
Plans
The Requin-type battleship on the ways is already a little dated. Since we have quality-0 14″ guns now, my intention is to design a new 14″ gun ship to take its place.
I’m inclined to try to keep two dreadnought ships under construction at all times, one battleship and one battlecruiser, but that may make it difficult to update our light forces. Should I sacrifice our big-ship construction program to bring the little ships up to date, or should I forge ahead in creating the best battle line millions of francs can buy?
Too, aircraft are appearing on the horizon, an ominous development for any navy which, across its entire roster, deploys zero anti-aircraft guns. Should we invest in carrier warfare as soon as we can, or stick out the dreadnought era as long as possible? Note that the balance of power between battleships and aircraft carriers shifts gradually over time—in the 1920s and early 1930s, it may be that the battleship remains king of the seas.
Anyway, that’s that for this week. Hopefully next week will be at the regularly scheduled time.
A good start to our campaign of trade warfare: our raiders sank six German merchants and one submarine.
A British light cruiser, the Phaeton, an obsolete 21-knot light cruiser, joins Lavoisier and Isly for a cruiser battle off of Bergen. It’s 11:37 a.m., and the weather is good but windy.
Unfortunately, the German cruisers show up and the French battlecruisers do not, so the French admiral bravely turns his ship to starboard and runs for the safety of Scapa Flow. Phaeton gives it her best, but the two 24-knot German cruisers are on hand, and she isn’t fast enough to escape.
April 1912
Here it is. The big one.
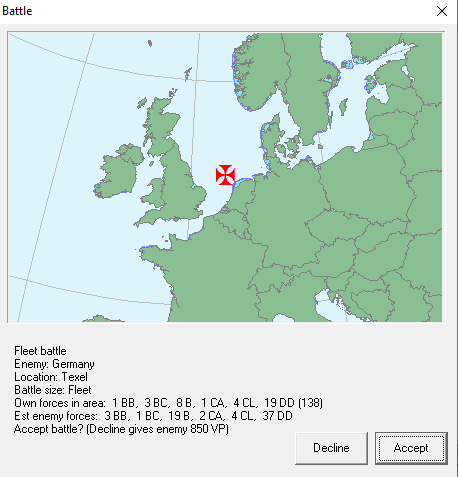
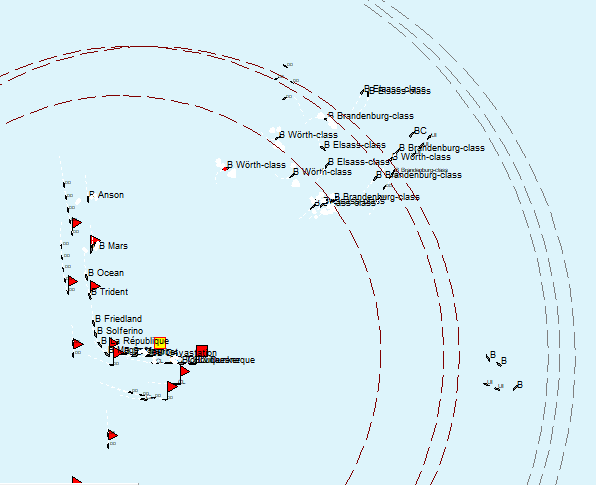
The Battle of Texel
Today’s forces include the full French fleet: three battlecruisers, one battleship, our entire predreadnought force, and a smattering of light cruisers and destroyers. Joining us are one British dreadnought, the Mars, and Anson, an 18-knot predreadnought, along with their escorting destroyers.
This is the first battle in which our scouting force (the battlecruisers and the three Isly-class light cruisers) are operating separately.
The weather is good, and it’s just after dawn. Let’s see what comes of the day.
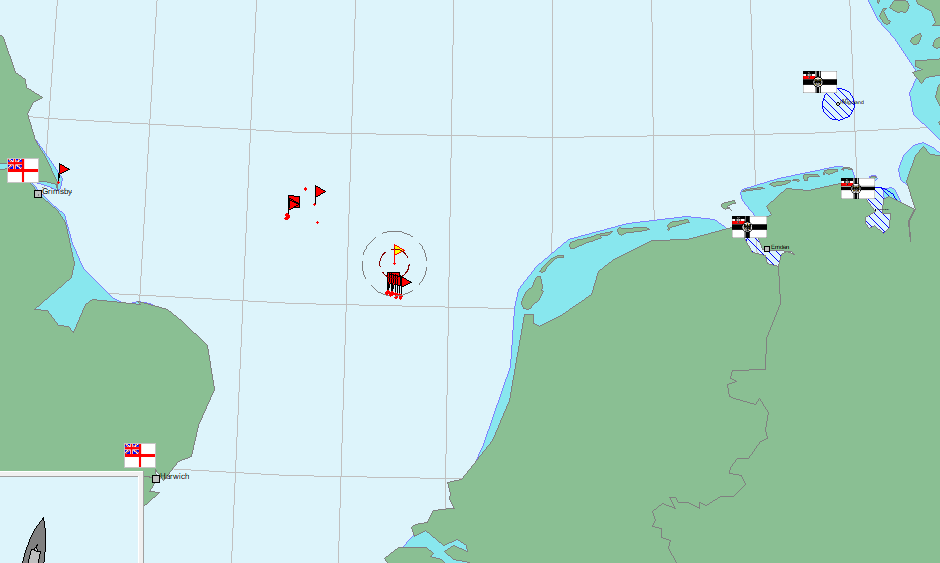
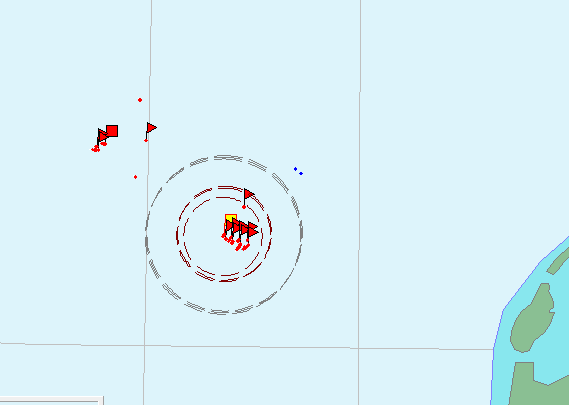
5:37 a.m.
Linois, the sole light cruiser scouting for the main fleet today, spots a light cruiser to the north. It immediately turns northwest, which puts it on a collision course with the battlecruiser force.
6:03 a.m.
The enemy light cruiser turns due east.
6:21 a.m.
Linois spots another ship, as the battlecruisers race east.
6:53 a.m.
The enemy’s battle line comes into slight.
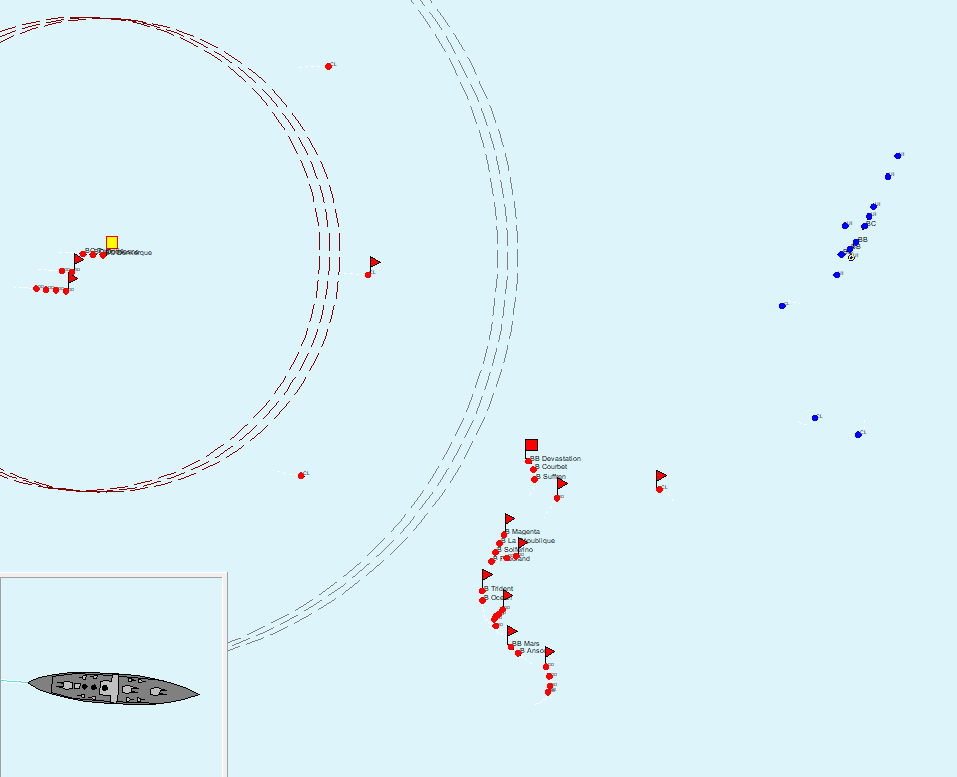
7:08 a.m.
As the lines converge, our Courbet is the first to take a hit—a harmless one to the superstructure.
The lead divisions are now engaged—Devastation firing eight-gun broadsides at the German Ostfriesland, the super-pre-dreadnought from last time, leading the way.
7:23 a.m.
The battlecruisers slot into the battle line just ahead of the lead battle division. The Ostfrieslands leading the German line turn away, although it may just be to open the range. (Their guns reach further than ours do.)
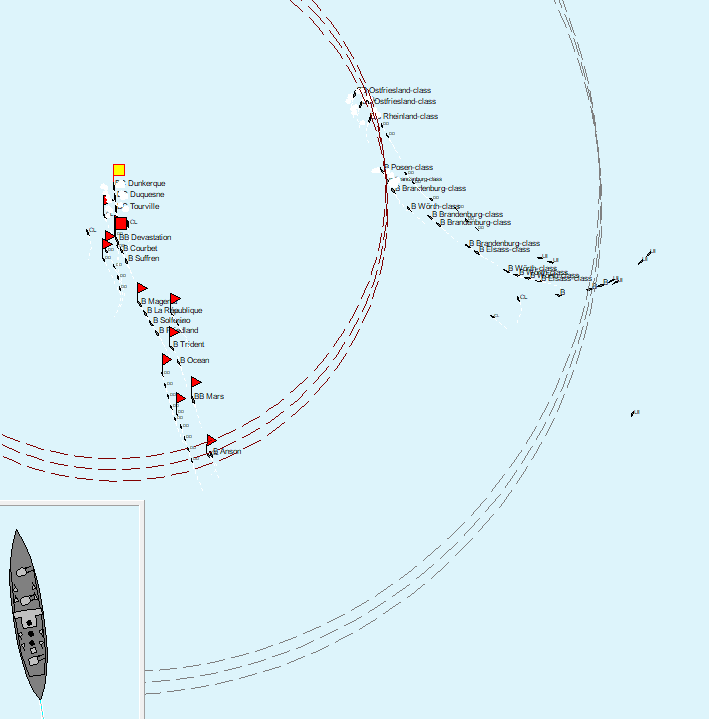
7:44 a.m.
For once, the gunnery duel in the early going is favoring the good guys—four hits to one.
8:00 a.m.
The front of the German line has turned north-northeast, so in the hopes of catching the back of the German line unawares, I order a near-180-degree turn, so that while the Germans are heading north, we’ll be heading south.
8:20 a.m.
I am content to call that a smart move. The German super-pre-dreadnoughts have disappeared off to the northeast, and the Allied line is in good order while the German battleships are entirely out of sorts.
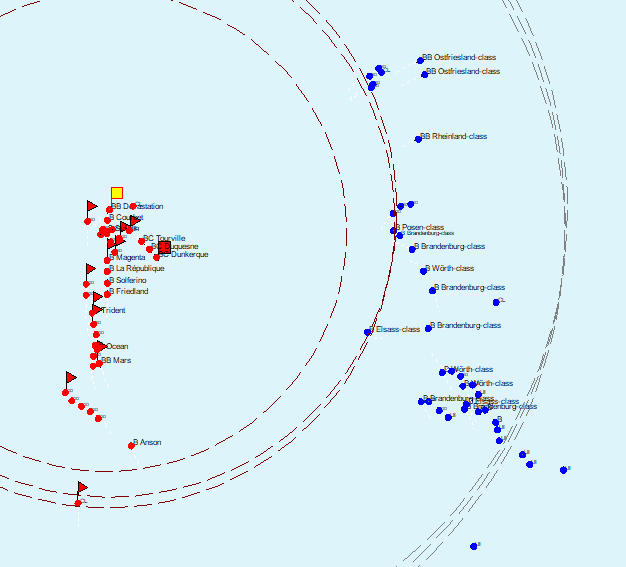
8:59 a.m.
The Germans are attempting to retire from the field. Several of their predreadnoughts are heavily damaged. I expect we’ll be able to finish them off. After all, we still have… nine hours and fifty minutes before dusk.
9:26 a.m.
Duquesne takes a torpedo hit and falls out of line.
10:01 a.m.
Duquesne‘s torpedo hit proves fatal, but we get revenge for her with a torpedo to one of the Elsass-class pre-dreadnoughts still engaged.
11:00 a.m.
A glorious victory is in progress. While the German fleet ran, we managed to peel off six predreadnoughts, which we are currently hammering with a superior force.
Results
Seven predreadnoughts down, for the price of one battlecruiser (to be replaced next month; Lyon was delayed again) and two destroyers (cheap and easy to rebuild, although the question of when is a harder one).
Torpedoes proved critical on both sides, sinking Duquesne and contributing heavily to the sinkings of a number of German battleships.
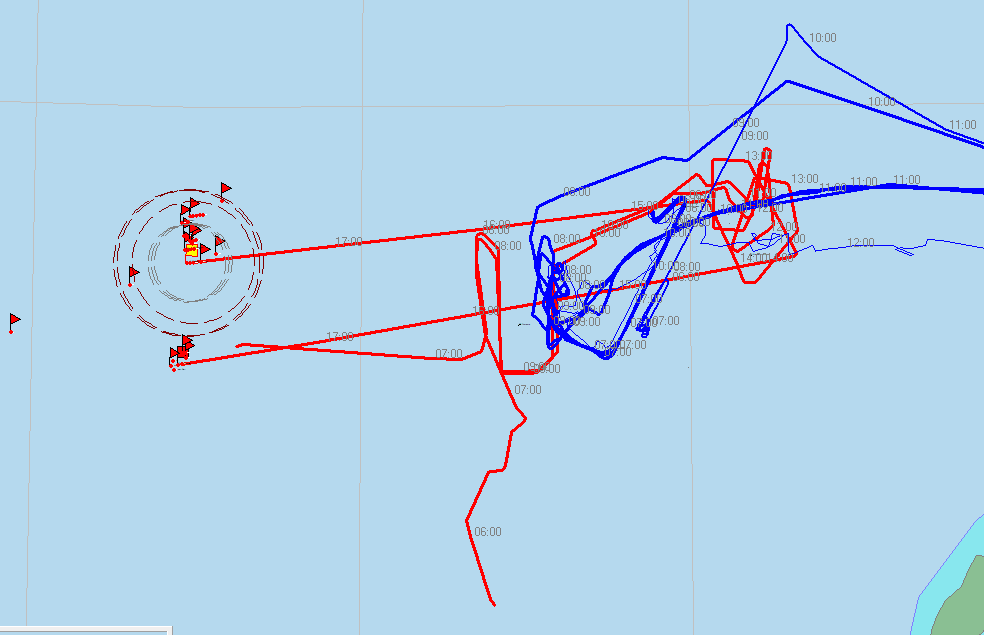
In the after-action map, you can see the critical elements of the battle: the turn to the north to parallel the German battle line, the reversal south which permitted the German super-pre-dreadnoughts to escape but allowed us to finish off a large number of the pre-dreadnoughts, and the long mop-up to the east-northeast.
The game calls it a minor French victory, on the basis that we lost a battlecruiser. I say it’s better than a mere minor victory.
May 1912
Lyon, designed as a 25-knot battlecruiser, has difficulty making her design speed in trials. She’ll go into the books as a 24-knot battlecruiser instead. I should have liked her to be a bit faster.
To replace her on the ways, the new Requin class goes into development. On the (admittedly German) theory that the first duty of a warship is to stay afloat, she retains a 12″ armament (our quality-0 12″ guns served us in good stead in the last fleet battle, and twelve of them helps with the smaller shell). Her 22-knot speed suffices for our current battle line (lacking oil, high speed is hard for us right now), and her 14″ belt is more than enough to stop shells from the guns we’re likely to face.
French raiders have a successful month, sinking eleven German merchants.
June 1912
On the 23rd, coastwatchers detect a German raid approaching Calais. Nine battleships and two battlecruisers put to sea in response: Devastation (our sole dreadnought, currently); Courbet (one of our two Trident semi-dreadnoughts); Ocean, Solferino, La République, Magenta (four predreadnoughts); Tourville and Dunkerque (the surviving Duquesne-class ships); and a surprise appearance from Mars, Jupiter, and Majestic, three British dreadnoughts.
The weather is breezy and overcast, but patrol boats and coastal lookouts indicate that a) the German force is quite small, and b) it’s headed directly for the narrowest part of the Channel.
The dot in the northeast portion of the map is an old sighting report. The line is the freshest report, along with an indication of where the enemy is, provided the sighting report’s course and speed were correct.
It’s relatively early in the morning, and being so close to the solstice means we’ll have ample time to defeat the Germans if we can trap them.
At 10:44 a.m., leading elemnents of the Scouting Force sight German ships.
By 11, it’s clear that a decent porton of the German fleet is out to play, but crucially, not all of it. I don’t think we’re going to catch the modern German ships (Ostfriesland and Rhineland, two of the super-pre-dreadnoughts), but we might end the careers of a few more German predreadnoughts if we’re lucky.
In the final reckoning, the French Navy bags all three of the predreadnoughts on the field.
A glorious victory. As an added bonus, it breaks the German blockade.
July 1912
In technological news, we’ve unlocked destroyers of up to 1100 tons. Perhaps a new design to replace some of those we’ve lost?
The battle this month is another fleet battle, a few dozen miles west-southwest of Brest.
Devastation is in the yards, undergoing repairs from so facing the German forces in the area are our two Duquesne-class battlecruisers (regrettably, Lyon has not finished her working up), our eight pre-dreadnought battleships, and two British dreadnoughts (Jupiter, an obsolete 6-gun/18-knot model, and Mars, a 10-gun/22-knot model which has played a starring role in multiple battles so far.)
Facing us are (probably) the two German super-pre-dreadnoughts, the remaining nine standard pre-dreadnoughts, and some light units. I’d say we have slightly better than even strength, and we’re notably well-positioned this time. We have the shorter path back to the Channel, where the German fleet would probably prefer to run, we’re downwind of them (so our smoke will blow away and theirs will get in their way), and our battlecruisers are to the north of the Germans.
With the scouting force in advance of the main fleet and light cruisers spread out in a search line, La Royale occupies quite a lot of ocean.
12:45 p.m.
That’s the only downside—we’re into the afternoon. Seven hours until dusk isn’t a ton, but hopefully it’ll be enough.
12:55 p.m.
The scouting force catches sight of the enemy battle line. We should be able to cut them off with time to spare.
14:04 p.m.
A near-textbook approach completed, the fleet closes to range and prepares to turn in line with the enemy.
15:45 p.m.
The German heavy units make it away, but it’s entirely possible we’ll sink most of the German Navy’s remaining pre-dreadnought fleet today.
Results
Night falls on another dramatic French victory. At the cost of one pre-dreadnought and a few destroyers, we sank seven German pre-dreadnoughts.
Tourville and Dunkerque, gunnery champions in the preceding battle by a country mile, are joined by Lyon in the aftermath, whose 15″ guns will give the battlecruiser squadron unprecedented reach and striking power.
July 1912, cont’d.
On the basis that the German fleet is now, in large part, at the bottom of the Atlantic, I’m planning on sending the battlecruisers to the Mediterranean once they’ve been patched up, where they can begin to whittle down the German cruiser force, which is largely deployed there. Britain’s contributions to the war effort have been most satisfactory in Northern Europe, so between our battleships and theirs I suspect we can keep the Germans bottled up.
In terms of war goals, I don’t have designs on many of the German colonies, which are all outside of our invasion range anyway. My primary objective is to impose debilitating reparations (which has never backfired for France re: Germany), with which I can continue to modernize the fleet even on a low-tension, peacetime budget.
August 1912
I feel justified in picking this option.
Of course, just after delivering that ultimatum, we lose the Lavoisier (second of her name) to a magazine explosion in a light cruiser action off of St. Nazaire. This calls for a new class.
September 1912
A cruiser action in the Bay of Biscay sees Dunkerque, left behind in Northern Europe to finish repairs while her sisters sailed for Marseilles, send two German light cruisers to the bottom, a fitting revenge for Lavoisier.
December 1912
A few boring months end with an extraordinary victory.
I feel a little bad about not taking screenshots during the battle, but really, it wasn’t very exciting. The British indicated that a German convoy was on its way from Norway to Germany proper, carrying iron ore. The French fleet sortied, joined by a pair of British dreadnoughts, and, crucially, a flotilla of British destroyers. Rather than flee and let the convoy be destroyed utterly without a fight, the three German super-pre-dreadnoughts turned to close the range and bring their large secondary batteries to bear, at which point accurate torpedo work by the British destroyers slowed them to the point where we could overwhelm them with volume of fire.
There were some interesting bits of cruiser action off to the north of the main battle, where French ships darted in toward the convoy while Germans shuffled east and west to fend them off.
The game keeps track of your glorious victories, and proposes names. In terms of strategic decisiveness, I feel like this fits, even if it was a) a little smaller than the historical one, and b) much more tactically decisive.
January 1913
Intel has some juicy news. The German ships must be very fast indeed, because our battlecruisers are just about even with theirs, and substantially lighter.
Wrap-Up
After one year of war, the combined might of the Allied navies has utterly swept the Germans from command of the sea. They have no dreadnoughts, battlecruisers, or battleships of any kind afloat. The German heavy cruiser force has been a non-factor in the war so far; much of it is currently in the Mediterranean, cut off from its bases.
French naval superiority is about to get even bigger—in two months, Redoubtable will be in service, followed five months later by Marengo. Four new destroyers will join the fleet around the same time to fill in for losses; two new light cruisers are under construction and due in about a year and a half.
The victory point totals are extremely favorable to us: 40,340 to 14,843. We have, understandably, gained somewhat in prestige as well: up to 29, our peak so far. When the war ends, I’m not much inclined to push for colonies. Germany doesn’t have very many good ones, having started the race when the leaders were already halfway through, and reparations will help us keep building ships when the postwar budget crunch comes.
To replace the two new dreadnoughts coming soon, I have it in mind to start another next-generation Requin-class dreadnought, and to design a cost-controlled battlecruiser—something with 9 12″ guns, 12″ armor, and 27-knot speed is well within reason.
I’m going to cut this update short here—covering two years of war in great detail, especially if it’s this eventful, is tricky.
Your thoughts on strategy, planning, and shipbuilding welcome.
Tensions still run about as high as they can possibly run with Germany without a war, when an unwelcome event pops up.
We can ignore the Navy Minister, but that’ll ding our prestige and budget badly. We can commit to building half as many destroyers, but that commits us to a potentially-silly course of action without any funding to make up for it.
So, I take the deal. I’ll build a few destroyers as a tip of the hat to the naval minister, and will take the ding in prestige when he gets mad about my lack of 15 destroyers at once—unless we go to war with Germany first, which resets the clock altogether.
August 1910
A discount Lyon? How can I say no, even if the conning tower armor is missing? The Lille-class will be there if I want one later.
The naval minister changes his mind.
The yards are humming, but not with eight cruisers.
At least we’re putting the money to better use.
September 1910
I don’t recall if this event raises tensions with other nations, but we’re about to find out. The chance to beat up on Austria-Hungary is too sweet to ignore.
It doesn’t raise tensions with Germany, but also doesn’t get us near a war with Austria-Hungary, either. Since Germany is looking like our most likely dance partner, let’s take a look at their Jane’s Fighting Ships page.
… interesting. Unless I miss my guess…
… Germany’s ‘dreadnoughts’ aren’t, or at least, they aren’t on the grounds of armament. That’s an absurd amount of belt armor, though.
Their other heavy units are pretty ordinary. Their 23-knot armored cruisers are a little faster than the Mediterranean average, but they would still be easy prey for our original Duquesne-class battlecruisers (24-knot speed, 11″ guns, armor against same). The size of their pre-dreadnought battle line is a bit concerning, though.
December 1910
No, we can’t guarantee a victory. It hurts our prestige, but increases the budget. With the extra cash, I lay down another Redoubtable-class dreadnought, this one to be called Marengo.
French engineers have developed a 16″ naval gun, which we won’t really be able to mount in anything for a little while yet.
January 1911
I’ve never been at such a high-tension fever pitch for so long without a war starting. The money is nice. The brinksmanship is tense.
Italy has a 27,000-ton battlecruiser under construction, which is worryingly large. Our heaviest ship to date is 23,600 tons.
One of the nice things about playing Rule the Waves 2 in AAR fashion is that there’s less of a tendency to rush. Because I have to write things down, I have more of an incentive to take my time.
February 1911
I take the expected prestige hit from failing to build eight cruisers at once, leaving me… exactly where I was before the request, except with a bigger budget.
March 1911
We develop oil-fired boilers, which is all well and good, except we don’t have access to oil.
April 1911
Our steadfast allies the British want to buy some shell technology off of us. I happily sign off on it; it’ll buy us another month or two at our fever pitch of shipbuilding. There are currently two battleships and two battlecruisers in the yard, two each of the Redoubtables and Lyons, along with a light cruiser and three destroyers.
May 1911
Wonder of wonders, tensions with Germany are slightly reduced.
French naval architects have hit upon the idea of superfiring forward turrets as well, which is apt to yield a very traditional-looking 10- or 12-gun dreadnought (two turrets forward, one superfiring; two turrets aft, one superfiring) when the money is there, in ten or twelve months.
June 1911
Italy’s new light cruiser is now the Mediterranean’s fastest. I believe our ships are a match for it, though, given that our fleet-service cruisers have quality-1 6″ guns—more or less equivalent to standard 7″ guns.
Word of German experiments with airships has reached France, and not to be outdone, we begin to look into the idea.
July 1911
Continued problems in the shipyards have delayed a number of our vessels—in particular, the two Lyons have not been trouble-free ships, each delayed by a month. (Since costs in Rule the Waves are per month rather than overall, delayed ships end up costing us more.)
October 1911
Rising tensions between Germany and Great Britain rattle an otherwise calm autumn. War has not yet been declared, but it’s very close.
February 1912
Well, it was a good run of peace, but now it’s time to turn the dogs of war loose once again.
The first month’s battle is an inconclusive destroyer action just north of the English Channel. Outnumbered, the French force manages to stay at the edge of the German ships’ range until dark, at which point it retreats into port at Dunkerque. Two old Fauconneau-class destroyers take damage, but neither sinks.
War Planning
What with it being Trademarked Football Game Sunday this week and a beer-brewing day Saturday, I don’t expect to have the time to get too deep into this war before I would have to write the update, so I think the thing to do here is to cut this entry short and sound out the naval staff (i.e., you, the readers) on how this war should be prosecuted.
20,000 Yards: Forces and Shipyard Plans
At present, we have five units of note building:
Redoubtable and Marengo, 23-knot, 23,600-ton battleships with 12.5″ belts, 10 12″ guns, and 10 6″ secondary guns, arriving in 12 and 17 months, respectively.
Lyon and Marseilles, 25-knot, 22,000-ton battlecruisers with 12″ belts, 6 15″ guns, and 12 4″ secondaries, arriving in 2 and 10 months, respectively.
Cassard, a Pascal-class light cruiser, also due in 2 months.
In addition to those, there are eight trawlers in the yards being armed, to run down submarines and serve as cheap trade protection.
Compared to the Germans, we have more full-on dreadnoughts (one), but they have three of what I’d call super-pre-dreadnoughts, with 16″ belt armor and 4 13″ guns, and one presumably more modern dreadnought under construction, due 1914. Our battlecruiser force is superior to theirs. We’ll have five battlecruisers, two of them armed with 15″ guns, before they have a single one (theirs are due 1914 and 1915).
In sum, our dreadnought force is superior (one battleship plus two building, three battlecruisers plus two building), even though we only have second-line ships in service at present. Our first-line ships (by the standard of 1912) will be ready before theirs.
In predreadnoughts, the Germans have a massive edge in numbers (19 to our 8), but even our old La Républiques are superior to all but their latest ships.
The German armored cruiser force is quite large (13 ships to our 5), and their two most recent ones (built 1908 and 1909) feature 10″ guns and 24-knot speed (but very light armor). Otherwise, nothing to write home about. Our Gueydons, though old, can outrun everything but the two recent ships.
In light cruisers, we have the edge in numbers (18 to 12) and in modernity. The best German light cruisers are likely better than our best ships, however, and many of our light cruisers are overseas fulfilling colonial requirements. Further, the Germans are engaged in building a number of light cruisers at present.
In destroyers, the Germans have an edge in numbers (42 to 30). Quality is a toss-up. In submarines, the Germans have an edge.
In general, we’re a bit behind on quantity, and even or ahead on quality. The question here is, what should we focus on? Large ships, and try to nibble away at the Germans where possible? Fast ships, and destroy their commerce and their raiders while avoiding risky fleet actions? Submarines and destroyers, and try to torpedo them into submission?
10,000 Yards: Deployments and Roles
At present, even with the larger part of our fleet stationed in the Northern Europe zone, the German fleet has us blockaded, which will sap our victory points over time. Given how little Great Britain contributed to the last war, I don’t think we can count on them all that much to pitch in.
I’ve taken the liberty of engaging in a a relatively robust raiding campaign out of the gate. Two of the reactivated Gueydons, one Tage, and all four Chateaurenaults have been dispatched to the far corners of the German colonial empire, where they will snatch up merchants left unprotected by the German fleet. Raiders and submarines will earn us easy victory points, which may help make up for the fleet battles we may be avoiding.
Should we focus further on raiding, or keep the fleet closer to home and hope for some even battles?
Should we turn the battlecruisers loose as raiders and raider-hunters, or keep the battlecruisers with the fleet?
Broadside-to-Broadside: Battles and Tactics
As was the case with Italy, our ships are generally faster than their German equivalents. Technology has come far enough now, though, that our older light cruisers and predreadnoughts are slower than some of the ships they might run across in battle.
Given that conditional superiority, the clear choice is to fight this war much like the last ones, engaging only when success is reasonably assured and running from the other fights (or avoiding them altogether). If you have any other ideas, however, I’m all ears.
Status
The above more or less suffices, but for a quick budget report:
The monthly wartime budget is 24,908, of which 11,569 goes to maintenance and 12,828 goes to construction.
Research and intelligence bring us to a monthly deficit of 1,732, with 4,022 in the bank. Two ships coming out of the yards in the next few months will put us back in the black before we run out of money.